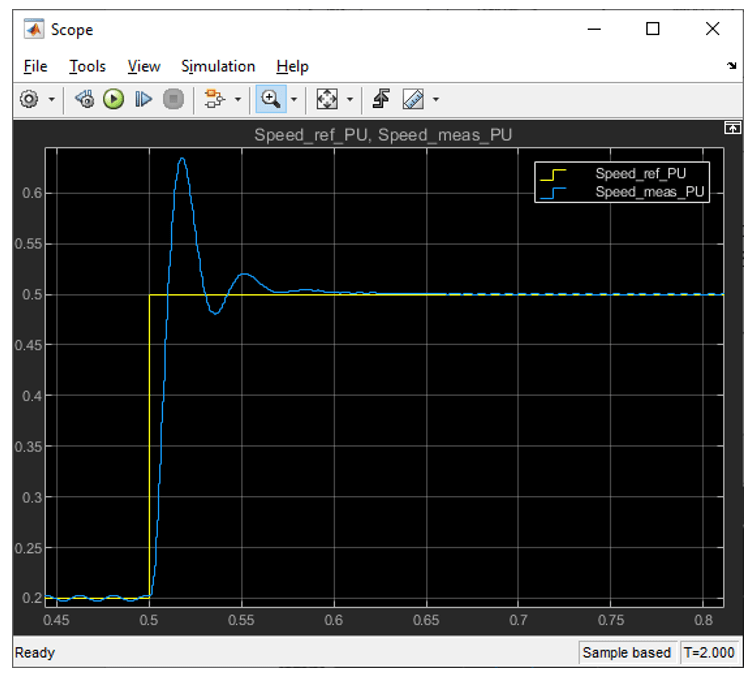
Чтобы вручную настроить подсистему Контроллер, добавьте шаговый вход (в области значений 0.2 на 0.5 PU) на вход Speed_ref_PU в Подсистеме Контроллера Скорости. Отслеживайте переходную характеристику скорости и настраивайте параметры Подсистемы Контроллера Скорости. Этот рисунок показывает переходную характеристику контроллера скорости.
Предыдущая процедура предоставляет подход к реализации регулирования скорости для двигателя PMSM в симуляции. Запустите симуляцию и проанализируйте эффективность контроллера.
Вы можете сгенерировать код С из этого алгоритма управления, используя Embedded Coder®. Можно развернуть этот код и аппаратные драйверы на целевом компьютере.
