Явный прогнозирующий контроллер модели
Model Predictive Control Toolbox
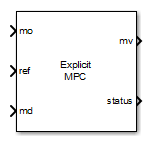
Блок Explicit MPC Controller использует следующие входные сигналы:
Либо измеренные выходы объекта управления (mo) или пользовательская оценка состояния (x[k|k])
Ссылка или уставка (ref)
Измеренное нарушение порядка объекта (md), при наличии
Блок Explicit MPC Controller использует интерполяционную таблицу, чтобы сохранить предварительно вычисленный кусочно-аффинный оптимальный закон управления вместо решения квадратичной задачи оптимизации программирования во время выполнения в каждом контрольном интервале, подобном блоку MPC Controller. Учитывая ту же задачу MPC, два блока возвращают одно и то же решение. Блок Explicit MPC Controller требует меньше вычислительных усилий в режиме онлайн, что полезно для приложений, которым нужен короткий контрольный интервал. Однако он имеет более тяжелые автономные вычислительные усилия и больший объем памяти. Действительно, комбинаторная природа явного MPC ограничивает его использование приложениями с относительно небольшим количеством входов, выходов и переменных состояния, коротким горизонтом предсказания и небольшими выходными ограничениями.
Этот Explicit MPC Controller поддерживает только подмножество необязательных функций MPC, как показано в следующей таблице.
| Поддерживаемые функции | Неподдерживаемые функции |
|---|---|
|
|



