Несколько явных контроллеров MPC
Model Predictive Control Toolbox
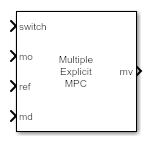
Блок Multiple Explicit MPC Controllers использует следующие входные сигналы:
Измеренные выходы объекта (mo)
Ссылка или уставка (ref)
Измеренное нарушение порядка объекта (md), при наличии
Сигнал переключения (switch)
Блок Multiple Explicit MPC Controllers позволяет вам переходить между несколькими явными контроллерами MPC в режиме реального времени на основе текущих условий работы. Обычно каждый контроллер проектируется для определенной области рабочего пространства. Используя доступные измерения, вы обнаруживаете текущую рабочую область и выбираете соответствующий активный контроллер, используя switch входной порт.
Сигнал переключения выбирает активный контроллер из списка двух или более кандидатов явных контроллеров MPC. Эти контроллеры уменьшают вычислительные усилия в режиме онлайн, используя закон управления с поиском по таблице во время каждого контрольного интервала вместо решения квадратичной задачи программирования. Для получения дополнительной информации см. раздел Explicit MPC Controller.
Для повышения эффективности неактивные контроллеры не оценивают свой закон контроля. Однако, чтобы обеспечить бесшумную передачу между контроллерами, неактивные контроллеры продолжают выполнять оценку состояния.
Как и для блока Multiple MPC Controllers, вы не можете отключить оценку для блока Multiple Explicit MPC Controllers. Один контроллер должен быть всегда активен.
Как и блок Explicit MPC Controller, блок Multiple Explicit MPC Controllers поддерживает только подмножество необязательных функций MPC, как показано в следующей таблице.
| Поддерживаемые функции | Неподдерживаемые функции |
|---|---|
|
|

