Вычислите коэффициент усиления постоянного тока с обратной связью от выходных нарушений порядка до измеренных выходов, принимая, что ограничения неактивны в установившемся состоянии
Используйте эту функцию, чтобы вычислить устойчивое состояние выхода чувствительность закрытого цикла. Нулевое значение означает, что измеренный выход объекта управления может отслеживать требуемую выходную контрольную уставку.
dcgain = cloffset(MPCobj)dcgain. mpcobj - объект MPC, задающий контроллер, для которого вычисляется коэффициент усиления с обратной связью.
Вычисление эффекта Выхода Нарушений порядка
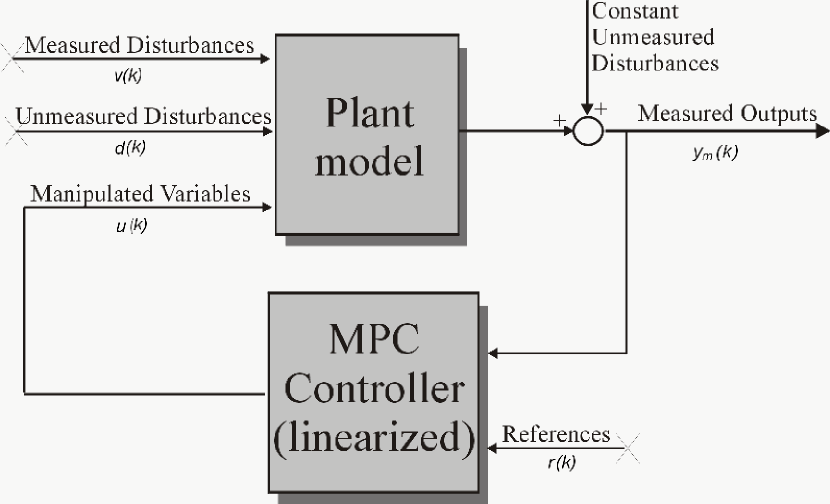
Опираясь на принцип суперпозиции эффектов, коэффициент усиления вычисляется обнулением ссылок, измеренными нарушениями порядка и неизмеренными входными нарушениями порядка.
