Ориентация от показаний акселерометра и гироскопа
The imufilter Система object™ предохраняет данные акселерометра и гироскопа для оценки ориентации устройства.
Для оценки ориентации устройства:
Создайте imufilter Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
FUSE = imufilterFUSEдля слияния данных акселерометра и гироскопа для оценки ориентации устройства. Фильтр использует вектор состояния с девятью элементами, чтобы отследить ошибку в оценке ориентации, оценке смещения гироскопа и оценке линейного ускорения.
FUSE = imufilter('ReferenceFrame',RF)imufilter фильтра Системного объекта, который запирает данные акселерометра и гироскопа, чтобы оценить ориентацию устройства относительно систему координат RF. Задайте RF как 'NED' (Северо-Восток-Даун) или 'ENU' (Восток-Север-Вверх). Значение по умолчанию 'NED'.
FUSE = imufilter(___,Name,Value)Name к заданной Value. Неопределенные свойства имеют значения по умолчанию.
FUSE = imufilter('SampleRate',200,'GyroscopeNoise',1e-6) создает Системный объект, FUSEс частотой дискретизации 200 Гц и шумом гироскопа, установленным на 1e-6 радиан в секунду в квадрате.[ fuses accelerometer и показания гироскопа для вычисления ориентации и скорости вращения измерений. Алгоритм принимает, что устройство стационарно перед первым вызовом.orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Загрузите rpy_9axis файл, содержащий зарегистрированные данные акселерометра, гироскопа и датчика магнитометра от устройства, колеблющегося с тангажом (вокруг оси Y), затем рыскание (вокруг оси Z), а затем крен (вокруг оси X). Файл также содержит частоту дискретизации записи.
load 'rpy_9axis.mat' sensorData Fs accelerometerReadings = sensorData.Acceleration; gyroscopeReadings = sensorData.AngularVelocity;
Создайте imufilter Система object™ со скоростью дискретизации, установленной на скорость дискретизации данных о датчике. Задайте коэффициент десятикратного уменьшения два, чтобы уменьшить вычислительные затраты алгоритма.
decim = 2; fuse = imufilter('SampleRate',Fs,'DecimationFactor',decim);
Передайте показания акселерометра и показания гироскопа в imufilter объект, fuseдля вывода оценки ориентации тела датчика с течением времени. По умолчанию ориентация выводится как вектор кватернионов.
q = fuse(accelerometerReadings,gyroscopeReadings);
Ориентация определяется угловым перемещением, необходимым для поворота родительской системы координат к дочерней системе координат. Постройте график ориентации углов Эйлера в степенях с течением времени.
imufilter слияние правильно оценивает изменение ориентации от предполагаемой северо-обращенной начальной ориентации. Однако ось X устройства указывала на юг при регистрации. Чтобы правильно оценить ориентацию относительно истинной начальной ориентации или относительно NED, используйте ahrsfilter.
time = (0:decim:size(accelerometerReadings,1)-1)/Fs; plot(time,eulerd(q,'ZYX','frame')) title('Orientation Estimate') legend('Z-axis', 'Y-axis', 'X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)')

Моделируйте наклоняющийся БИНС, который содержит акселерометр и гироскоп, используя imuSensor Системные object™. Используйте идеальные и реалистичные модели, чтобы сравнить результаты отслеживания ориентации с помощью imufilter Системный объект.
Загрузите struct, описывающую основную истину движение и частоту дискретизации. Структура движения t описывает последовательные повороты:
рыскание: 120 степени за две секунды
тангаж: 60 степени более одной секунды
крен: 30 степени за полсекунды
крен: -30 степени за полсекунды
тангаж: -60 степени в течение одной секунды
рыскание: -120 степени за две секунды
На последнем этапе struct движения объединяет 1-е, 2-е и 3-е повороты в вращение с одной осью. Ускорение, скорость вращения и ориентация заданы в локальной системе координат NED.
load y120p60r30.mat motion fs accNED = motion.Acceleration; angVelNED = motion.AngularVelocity; orientationNED = motion.Orientation; numSamples = size(motion.Orientation,1); t = (0:(numSamples-1)).'/fs;
Создайте идеальный объект датчика IMU и объект фильтра IMU по умолчанию.
IMU = imuSensor('accel-gyro','SampleRate',fs); aFilter = imufilter('SampleRate',fs);
В цикле:
Симулируйте выход БИНС путем подачи движения основная истина к объекту датчика БИНС.
Фильтрация выхода БИНС с помощью объекта фильтра БИНС по умолчанию.
orientation = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientation(i) = aFilter(accelBody,gyroBody); end release(aFilter)
Постройте график ориентации с течением времени.
figure(1) plot(t,eulerd(orientation,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Ideal IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Измените свойства своего imuSensor для моделирования реальных датчиков. Еще раз запустите цикл и постройте график оценки ориентации с течением времени.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor',0.02); IMU.Gyroscope = gyroparams( ... 'MeasurementRange',4.3633, ... 'Resolution',0.00013323, ... 'AxesMisalignment',2, ... 'NoiseDensity',8.7266e-05, ... 'TemperatureBias',0.34907, ... 'TemperatureScaleFactor',0.02, ... 'AccelerationBias',0.00017809, ... 'ConstantBias',[0.3491,0.5,0]); orientationDefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationDefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(2) plot(t,eulerd(orientationDefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Способность imufilter отслеживать достоверные данные значительно уменьшается при моделировании реалистичного БИНС. Чтобы улучшить эффективность, измените свойства своего imufilter объект. Эти значения определяли эмпирически. Еще раз запустите цикл и постройте график оценки ориентации с течением времени.
aFilter.GyroscopeNoise = 7.6154e-7; aFilter.AccelerometerNoise = 0.0015398; aFilter.GyroscopeDriftNoise = 3.0462e-12; aFilter.LinearAccelerationNoise = 0.00096236; aFilter.InitialProcessNoise = aFilter.InitialProcessNoise*10; orientationNondefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationNondefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(3) plot(t,eulerd(orientationNondefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Nondefault IMU Filter') legend('Z-axis','Y-axis','X-axis')

Количественная оценка улучшенных производительностей измененных imufilter, постройте график кватернионного расстояния между движением основная истина и ориентацией как возвращено imufilter со свойствами по умолчанию и nondefault.
qDistDefault = rad2deg(dist(orientationNED,orientationDefault)); qDistNondefault = rad2deg(dist(orientationNED,orientationNondefault)); figure(4) plot(t,[qDistDefault,qDistNondefault]) title('Quaternion Distance from True Orientation') legend('Realistic IMU Data, Default IMU Filter', ... 'Realistic IMU Data, Nondefault IMU Filter') xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')

В этом примере показано, как удалить смещение гироскопа из БИНС с помощью imufilter.
Использование kinematicTrajectory для создания траектории с двумя частями. Первая часть имеет постоянную скорость вращения вокруг осей Y и Z. Вторая часть имеет изменяющуюся скорость вращения во всех трех осях.
duration = 60*8; fs = 20; numSamples = duration * fs; rng('default') % Seed the RNG to reproduce noisy sensor measurements. initialAngVel = [0,0.5,0.25]; finalAngVel = [-0.2,0.6,0.5]; constantAngVel = repmat(initialAngVel,floor(numSamples/2),1); varyingAngVel = [linspace(initialAngVel(1), finalAngVel(1), ceil(numSamples/2)).', ... linspace(initialAngVel(2), finalAngVel(2), ceil(numSamples/2)).', ... linspace(initialAngVel(3), finalAngVel(3), ceil(numSamples/2)).']; angVelBody = [constantAngVel; varyingAngVel]; accBody = zeros(numSamples,3); traj = kinematicTrajectory('SampleRate',fs); [~,qNED,~,accNED,angVelNED] = traj(accBody,angVelBody);
Создайте imuSensor Системные object™, IMUс неидеальным гироскопом. Функции IMU с ускорением «земля-правда», скоростью вращения и ориентацией.
IMU = imuSensor('accel-gyro', ... 'Gyroscope',gyroparams('RandomWalk',0.003,'ConstantBias',0.3), ... 'SampleRate',fs); [accelReadings, gyroReadingsBody] = IMU(accNED,angVelNED,qNED);
Создайте imufilter Системный объект, fuse. Функции fuse с смоделированными показаниями акселерометра и показаниями гироскопа.
fuse = imufilter('SampleRate',fs, 'GyroscopeDriftNoise', 1e-6); [~,angVelBodyRecovered] = fuse(accelReadings,gyroReadingsBody);
Постройте график скорости вращения «земля-правда», показаний гироскопа и восстановленной скорости вращения для каждой оси.
Скорость вращения, возвращенная из imufilter компенсирует эффект смещения гироскопа с течением времени и сходится к истинной скорости вращения.
time = (0:numSamples-1)'/fs; figure(1) plot(time,angVelBody(:,1), ... time,gyroReadingsBody(:,1), ... time,angVelBodyRecovered(:,1)) title('X-axis') legend('True Angular Velocity', ... 'Gyroscope Readings', ... 'Recovered Angular Velocity') ylabel('Angular Velocity (rad/s)')

figure(2) plot(time,angVelBody(:,2), ... time,gyroReadingsBody(:,2), ... time,angVelBodyRecovered(:,2)) title('Y-axis') ylabel('Angular Velocity (rad/s)')

figure(3) plot(time,angVelBody(:,3), ... time,gyroReadingsBody(:,3), ... time,angVelBodyRecovered(:,3)) title('Z-axis') ylabel('Angular Velocity (rad/s)') xlabel('Time (s)')

Примечание: Следующий алгоритм применяется только к опорной системе координат NED.
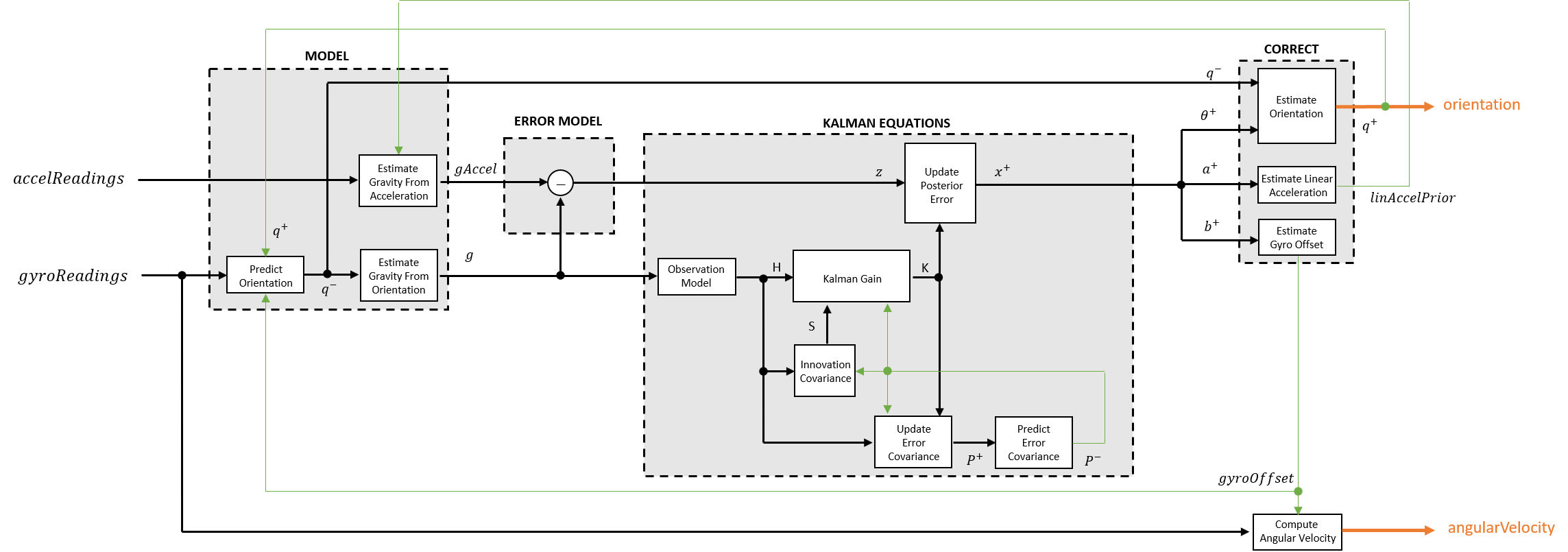
The imufilter использует шестиосевую структуру фильтра Калмана, описанную в [1]. Алгоритм пытается отследить ошибки в ориентации, смещении гироскопа и линейном ускорении, чтобы вывести конечную ориентацию и скорость вращения. Вместо непосредственного отслеживания ориентации косвенный фильтр Калмана моделирует процесс ошибки, x, с рекурсивным обновлением:
где xk является вектором 9 на 1, состоящим из:
θk -- вектор ошибки ориентации 3 на 1, в степенях, в момент времени k
bk -- гироскоп 3 на 1 нуле вектор смещения угловой скорости, в град/с, в момент времени k
ak -- вектор ошибки ускорения 3 на 1, измеренный в системе координат датчика, в g, в момент времени k
wk -- аддитивный вектор шума 9 на 1
Fk -- модель перехода состояния
Поскольку x k задан как процесс ошибки, априорная оценка всегда равна нулю, и, следовательно, модель перехода состояния, F k, равна нулю. Это понимание приводит к следующему уменьшению стандартных уравнений Калмана:
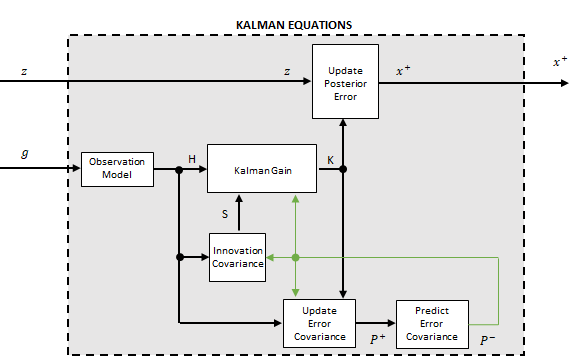
Стандартные уравнения Калмана:
Уравнения Калмана, используемые в этом алгоритме:
где
xk− - прогнозируемая (априори) оценка состояния; процесс ошибки
Pk− - предсказанная (априорная) оценка ковариации
yk -- инновации
Sk -- инновационная ковариация
Kk -- коэффициент усиления Калмана
xk+ - обновленная (апостериорная) оценка состояния
Pk+ - обновленная (a posteriori) оценка ковариации
k представляет итерацию, надстрочный индекс + представляет апостериорную оценку и надстрочный индекс − представляет априорную оценку.
Графические и последующие шаги описывают итерацию на основе одного кадра через алгоритм.
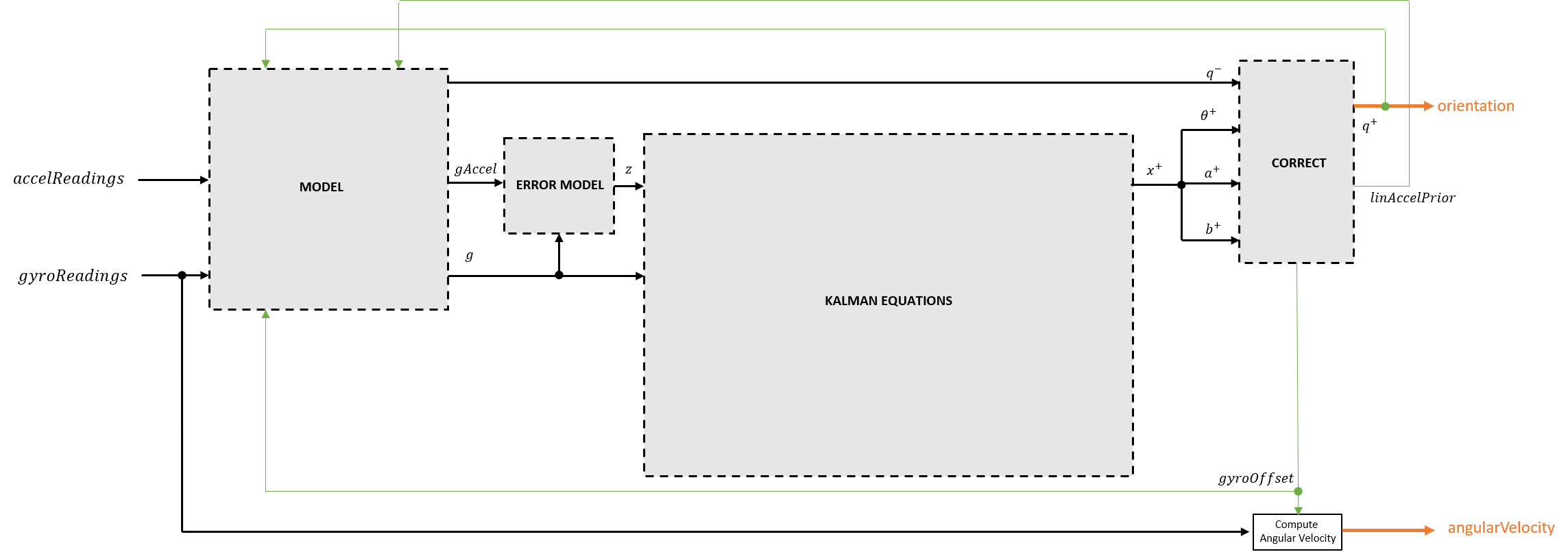
Перед первой итерацией accelReadings и gyroReadings входы chunked в системы координат 1 на 3 и DecimationFactor-by-3 системы координат, соответственно. Алгоритм использует самые актуальные показания акселерометра, соответствующие фрагменту показаний гироскопа.
Пройдите по алгоритму для объяснения каждого этапа подробного обзора.
Алгоритм моделирует ускорение и угловое изменение как линейные процессы.
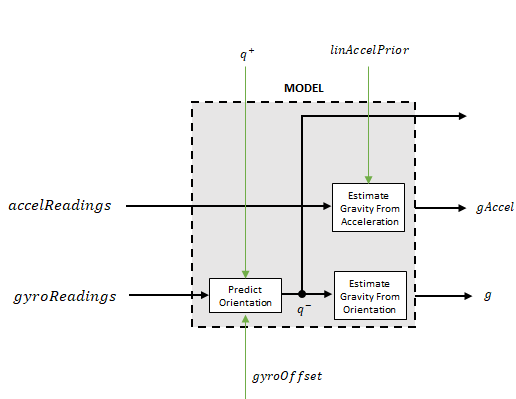
Ориентация для текущей системы координат предсказывается путем первой оценки углового изменения по сравнению с предыдущей системой координат:
где N - коэффициент десятикратного уменьшения, заданный DecimationFactor свойство, и fs является частотой дискретизации, заданной SampleRate свойство.
Угловое изменение преобразуется в кватернионы с помощью rotvec
quaternion синтаксис конструкции:
Предыдущая оценка ориентации обновляется путем поворота ее на И Q:
Во время первой итерации оценка ориентации, q−, инициализируется ecompass при предположении, что x -ось указывает на север.
Вектор гравитации интерпретируется как третий столбец кватерниона, q−, в матричном виде вращения:
См. ecompass для объяснения того, почему третий столбец rPrior может быть интерпретирован как вектор гравитации.
Вторую оценку вектора гравитации производят путем вычитания из показаний акселерометра истекшей оценки линейного ускорения предыдущей итерации:
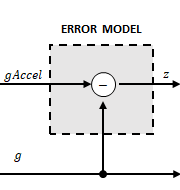
Модель ошибки является различием между оценкой гравитации из показаний акселерометра и оценкой гравитации из показаний гироскопа: .
Уравнения Калмана используют оценку тяжести, полученную из показаний гироскопа, g и наблюдения процесса ошибки, z, чтобы обновить усиление Калмана и промежуточные ковариационные матрицы. Коэффициент усиления Калмана применяется к сигналу ошибки, z, для вывода апостериорной оценки ошибки x+.
Модель наблюдения преобразует наблюдаемое состояние 1 на 3, g, в истинное состояние 3 на 9, H.
Модель наблюдения построена как:
где gx, gy и gz являются x -, y - и z - элементами вектора тяжести, оцененными из ориентации, соответственно. κ является константой, определяемой свойствами SampleRate и DecimationFactor: κ = DecimationFactor/ SampleRate.
Вывод модели наблюдения см. в разделах 7.3 и 7.4 документа [1].
Инновационная ковариация является матрицей 3 на 3, используемой для отслеживания изменчивости измерений. Инновационная ковариационная матрица вычисляется как:
где
H - матрица модели наблюдения
P− - предсказанная (априорная) оценка ковариации модели наблюдения, вычисленная в предыдущей итерации
R - ковариация шума модели наблюдения, рассчитанная как:
Следующие свойства определяют отклонение шума модели наблюдения:
κ -- (DecimationFactor/SampleRate)2
β -- GyroscopeDriftNoise
η -- GyroscopeNoise
λ -- AccelerometerNoise
Ковариация оценки ошибки является матрицей 9 на 9, используемой для отслеживания изменчивости состояния.
Ковариационная матрица оценки ошибки обновляется следующим образом:
где K - коэффициент усиления Калмана, H - матрица измерений и P− - ковариация оценки ошибки, вычисленная во время предыдущей итерации.
Ковариация оценки ошибки является матрицей 9 на 9, используемой для отслеживания изменчивости состояния. Априорная оценка ошибки, ковариация, P−, устанавливается в ковариацию шума процесса, Q, определенную во время предыдущей итерации. Q вычисляется как функция ковариации оценки апостериорной ошибки, P+. При вычислении Q условия перекрестной корреляции приняты незначительными по сравнению с терминами автокорреляции и равны нулю:
где
P+ - обновленная (a posteriori) оценка ошибки ковариация
β -- GyroscopeDriftNoise
η -- GyroscopeNoise
Для вывода терминов матрицы ошибок процесса смотрите раздел 10.1 документа [1].
Матрица усиления Калмана является матрицей 9 на 3, используемой для взвешивания нововведения. В этом алгоритме нововведение интерпретируется как процесс ошибки, z.
Матрица усиления Калмана построена как:
где
P- -- предсказанная ковариация ошибок
H -- модель наблюдения
S -- инновационная ковариация
Апостериорная оценка ошибки определяется путем объединения матрицы усиления Калмана с ошибкой в оценках вектора гравитации:
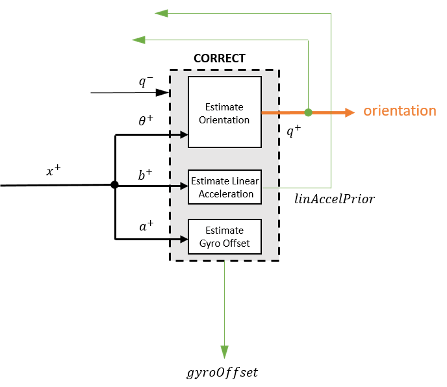
Оценка ориентации обновляется путем умножения предыдущей оценки на ошибку:
Линейная оценка ускорения обновляется путем распада линейной оценки ускорения из предыдущей итерации и вычитания ошибки:
где
Оценка смещения гироскопа обновлена, вычтя ошибку смещения гироскопа из смещения гироскопа от предыдущей итерации:
[1] Комплексирование датчиков с открытым исходным кодом. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., H.J. Luinge, C.T.M. Бэтен и П.Х. Велтинк. Компенсация магнитных нарушений порядка улучшает инерционное и магнитное измерение ориентации сегмента тела человека. Транзакции IEEE по нейронным системам и реабилитационной инженерии. Том 13. Выпуск 3, 2005, с. 395-405.
ahrsfilter | ecompass | gpsSensor | imuSensor
