

Преобразуйте кватернион в углы Эйлера ( степени)
eulerAngles = eulerd(quat,rotationSequence,rotationType)quat, в N -by-3 матрицу углов Эйлера в степенях.
quat - Кватернион для преобразования в углы ЭйлераКватернион для преобразования в углы Эйлера, заданные как скаляр, вектор, матрица или многомерный массив кватернионов.
Типы данных: quaternion
rotationSequence - Последовательность вращения'ZYX' | 'ZYZ' | 'ZXY' | 'ZXZ' | 'YXZ' | 'YXY' | 'YZX' | 'XYZ' | 'XYX' | 'XZY' | 'XZX'Последовательность поворота представления угла Эйлера, заданная в виде вектора символов или строки.
Последовательность поворотов задает порядок поворотов вокруг осей. Для примера, если вы задаете последовательность поворота 'YZX':
Первое вращение - вокруг оси y.
Второе вращение - это новая ось z -.
Третье вращение - это новая ось x -.
Типы данных: char | string
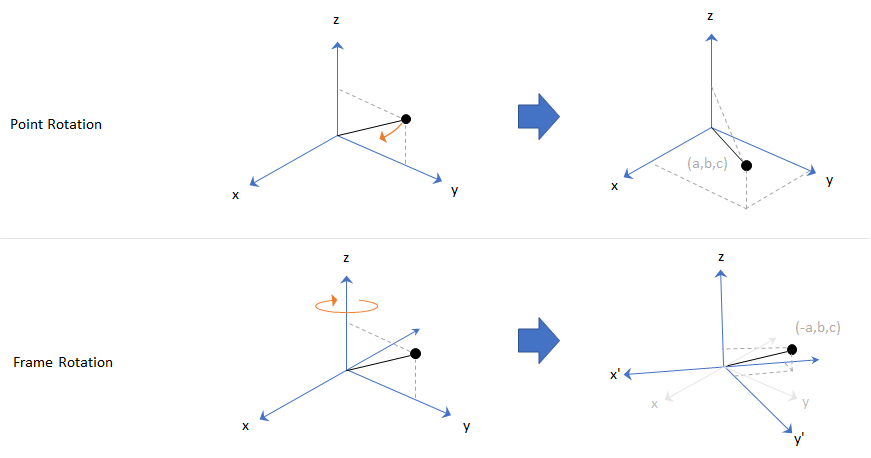
rotationType - Тип вращения'point' | 'frame'Тип вращения, заданный как 'point' или 'frame'.
При повороте точки система координат является статическим, а точка перемещается. При повороте системы координат точка является статической, и система координат перемещается. Вращение точки и вращение системы координат определяют эквивалентные угловые смещения, но в противоположных направлениях.
Типы данных: char | string