Высокоскоростной редуктор, основанный на циклоидальном движении диска
Simscape/Трансмиссия/Передачи

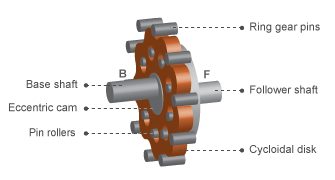
Блок Cycloidal Drive представляет компактный, с высоким отношением, механизм снижения скорости, который содержит четыре ключевых компонента:
Эксцентричный кулачок
Циклоидальный диск
Корпус кольцевой передачи
Штифтовые ролики
Эксцентриковый кулачок, который простирается от базового вала, находится внутри циклоидального диска. Этот диск зацепляется с корпусом кольцевой передачи. Штифтовые ролики, которые проходят от последующего вала, сидят в совпадающих отверстиях на циклоидальном диске.
Во время нормальной операции базовый вал управляет эксцентриковым кулачком. Кулачок вращается внутри циклоидального диска, заставляя его вращаться в эксцентриковом шаблоне вокруг оси смещения. При перемещении циклоидальный диск входит в зацепление с внутренними зубьями корпуса кольцевой шестерни. Внутренняя сетка меняет направление скорости вращения на противоположное.
Штифтовые ролики, проходящие от отверстий циклоидального диска, передают вращательное движение последующему валу. Этот вал вращается против базового вала с очень уменьшенной скоростью. Большой коэффициент уменьшения возникает из-за почти одинаковых чисел циклоидального диска и звонков кольцевой шестерни. Эффективное передаточное отношение:
где:
r - передаточное число.
nR - количество зубьев на кольцевой шестерне.
nC - количество зубьев на циклоидальном диске.
Передаточное отношение ограничивает скорости вращения основы и последующих валов в соответствии с выражением
где:
ωF - скорость вращения последующего вала.
ωC - скорость вращения базового вала.
Передаточное отношение также ограничивает крутящие моменты, действующие на основу и последующие валы, согласно выражению
где:
TB - крутящий момент привода сетки на базовом валу.
TF - крутящий момент привода сети на последующем валу.
Tf - потери крутящего момента из-за трения. Для получения дополнительной информации см. «Моделирование передач с потерями».
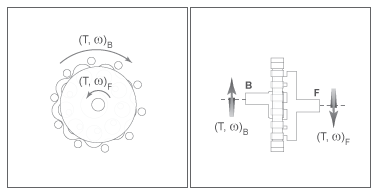
Рисунок показывает циклоидальный привод спереди и сбоку. Кинематика системы привода вызывает разворот основы и последующих угловых скоростей вала так, что два вала вращаются в противоположных направлениях.
Циклоидальный привод может работать в реверсивном режиме, то есть с степенью, протекающей от последующего вала к основанию. В обратном режиме эффективность передачи крутящего момента обычно незначительна. Можно настроить эффективность, изменив значение параметра Efficiency from follower shaft to base shaft.
Можно задать модель трения потерь сетки:
No meshing losses - suitable for HIL simulation, что игнорирует потери, чтобы позволить время расчета с поддержкой HIL.
Constant efficiency, которая является настройкой трения по умолчанию для версий блоков до R2020b. В этом случае вы задаете эффективность компонента, которая остается постоянной на протяжении всей симуляции
Temperature-dependent efficiency, который моделирует температурно-зависимые эффективности компонента путем создания 1-D интерполяционной таблицы на основе вектора Temperature и данного вектора КПД компонента. Эта настройка также включает тепловой H порта. Этот порт получает тепловой поток в блок, который переводится в температуру блока согласно параметру Thermal mass передачи.
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Friction model равным Temperature-dependent efficiency.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
