Механизм демпфирования поступательных вибраций
Simscape/Driveline/Муфты и приводы

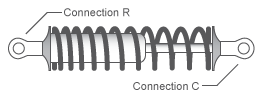
Блок Shock Absorber представляет собой систему пружины-демпфера, обычно используемую для демпфирования вибрации в механических системах. Внутренняя сила действует между портами R и C. Эта сила является суммой жесткости пружины, демпфирования, трения Кулона и жёстких упоров. Все вклады сил являются необязательными.
Блок Shock Absorber использует модели этих блоков:
| Блок | Вклад | Библиотека |
|---|---|---|
| Loaded-Contact Translational Friction | Трение Кулона | Simscape / Driveline / Brakes & Detents / Translational |
| Rotational Damper | Демпфирование | Simscape / Foundation Library / Mechanical / Translational Elements |
| Rotational Spring | Пружина | |
| Rotational Hard Stop | Жёсткий упор |
Включая жёсткий упор и трение Кулона повышает точность модели, но уменьшает скорость симуляции. Для получения дополнительной информации см. Раздел «Эффективность симуляции привода»
Механический порт сопоставлен с ползуном, который перемещается между упорами, установленными на корпусе.
Механический порт, сопоставленный со штоком.
Введите значение постоянной жесткости вязкой пружины, k. Значение по умолчанию 1e4
N/m. Значение должно быть больше или равно нулю.
Введите значение вязкой константы демпфирования, b. Значение по умолчанию 1e2
m/s. Значение должно быть больше или равно нулю.
Введите значение силы трения Кулона. Установка значения 0 устраняет вклад силы трения Кулона. Это увеличивает скорость симуляции, делая модель более подходящей для программное-аппаратного тестирования. Значение по умолчанию 0
N. Значение должно быть больше или равно нулю.
Введите значение статического/кинетического коэффициента трения, то есть Fs/ Fk. Значение должно быть больше единицы. Значение по умолчанию 1.1. Значение должно быть больше или равно единице.
Введите значение относительной скорости, ниже которой порты R и C блокируются и перемещаются вместе. Значение по умолчанию 0.001
m/s. Значение должно быть больше нуля.
Включите или исключить жёсткий упор, выбрав один из следующих опций:
No hard stops — Suitable for HIL simulation - Чтобы увеличить скорость симуляции путем исключения вклада жёсткого упора, выберите эту опцию по умолчанию.
Compliant hard stops - Чтобы повысить точность модели путем включения вклада жёсткого упора, выберите эту опцию. Выбор этой опции включает другие параметры.
Верхнее положение жёсткого упора, UB. Положительное перемещение за верхнюю границу активирует силу контакта с жёстким упором. Значение по умолчанию 0.1
m. Значение должно быть больше нижней границы.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Опустите жёсткий упор, LB. Отрицательное перемещение за нижнюю границу активирует силу контакта с жёстким упором. Значение по умолчанию -0.1
m. Значение должно быть меньше верхней границы.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Введите значение постоянной жесткости жёсткого упора, kHS. Значение по умолчанию 1e6
N/m. Значение должно быть больше или равно нулю.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Введите значение постоянной демпфирования с жёстким упором, bHS. Этот параметр задает свойство демпфирования сталкивающихся тел. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Значение по умолчанию 1e4
N/(m/s). Значение должно быть больше нуля.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Выберите жёсткий упор:
Stiffness and damping applied smoothly through transition region, damped rebound - Задайте переходную область, в которой сила масштабируется от нуля. В конце переходной области прикладываются полная жесткость и демпфирование. Эта модель имеет демпфирование, приложенное к отскоку, но это ограничено значением силы жесткости. В этом смысле демпфирование может уменьшить или устранить силу, обеспечиваемую жесткостью, но никогда не превышать ее. Все уравнения сглажены и не производят пересечений нуля.
Выбор этой опции включает Transition region параметр.
Full stiffness and damping applied at bounds, undamped rebound - Эта модель имеет полную жесткость и демпфирование, приложенные с влиянием в верхней и нижней границах, без демпфирования на отскоке. Уравнения не приводят к пересечениям нуля, когда скорость изменяет знак, но существует основанное на положении пересечение нуля в границах. Отсутствие демпфирования при отскоке помогает быстро продвинуть ползун мимо этого положения. Эта модель имеет нелинейные уравнения.
Full stiffness and damping applied at bounds, damped rebound - Эта модель имеет полную жесткость и демпфирование, приложенные с влиянием в верхней и нижней границах, с демпфированием, приложенным также на отскоке. Уравнения коммутируются линейно, но создают основанные на положении пересечения нуля. Используйте этот жёсткий упор, если simscape.findNonlinearBlocks указывает, что это блок, который препятствует линейному переключению всей сети.
Выбор Compliant hard stops для параметра Hard stop включает этот параметр.
Область, в которой сила растёт с нуля до полного значения. В конце переходной области прикладываются полная жесткость и демпфирование. Значение по умолчанию 0.1
mm.
Выбор Stiffness and damping applied smoothly through transition region, damped rebound для Hard stop model включает этот параметр.
Введите начальное значение деформации пружины. Значение по умолчанию 0
m.
Для оптимальной эффективности симуляции используйте настройку по умолчанию Hard Stops > Hard stop параметра, No hard stops - Suitable for HIL simulation.
