Вращательная связь между двумя валами привода
Simscape/Driveline/Муфты и приводы

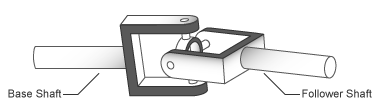
Блок Universal Joint представляет вращательную связь между двумя валами привода. Муфта передает крутящий момент между валами, так что они вращаются как модуль под приложенной нагрузкой. Две вращательные степени свободы, внутренние к муфте, позволяют валам соединяться под углом. Этот угол пересечения изменяется в соответствии с физическим сигналом, поступающим от порта A. Опциональная податливость, смоделированная как параллельный набор пружин-демпферов, позволяет муфте деформироваться под нагрузкой.
Можно использовать Universal Joint блок как соединение между двумя вращающимися компонентами привода - для примера, между ведущим и ведомым валами в train привода автомобиля.
Отношение угловых скоростей вала зависит от двух параметров: угол пересечения между двумя валами и угол поворота базового вала. Вход физического сигнала обеспечивает угол пересечения, в то время как параметр диалогового окна обеспечивает начальный угол базового вала. Эти два угла фиксируют отношение двух угловых скоростей вала согласно нелинейному уравнению:
где:
ωF - скорость вращения последующего вала вокруг его оси длины.
ωB - скорость вращения базового вала вокруг его оси длины.
θB - угол поворота базового вала вокруг его оси длины.
A - угол пересечения между основой и последующими валами вокруг контакта базового вала.
Две схемы на рисунке иллюстрируют параметры уравнения. На каждой схеме левый вал представляет базовый вал, а правый - последующий вал. На правой схеме показано сцепление, представленное на левой схеме после вращения валов на 90 ° вокруг осей их длины (штриховые сегменты линии).
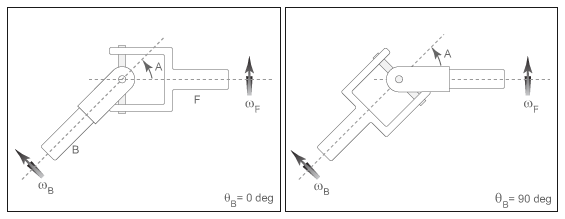
На рисунке угол пересечения является углом между двумя валами вокруг контакта базового вала. Абсолютное значение этого угла должно опуститься в области значений 0 ≤ A < Maximum intersection angle. Угол базового вала является углом базового вала вокруг его оси длины. Угол базового вала также является временным интегралом угловой скорости базового вала, ωB.
Belt Drive | Belt Pulley | Chain Drive | Flexible Shaft | Rope Drum
