Степень передачи с фрикционным ремнем, обернутым по окружности шкива
Simscape/Driveline/Муфты и приводы

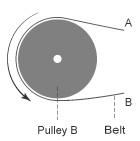
Блок Belt Pulley представляет собой шкив, обернутый гибким идеальным, плоским или V-образным ремнем. Идеальный ремень не скользит относительно поверхности шкива. Шкив может опционально перемещаться через порт C, что необходимо в системе блока и захвата.
Блок учитывает трение между гибким ремнем и периферией шкива. Если силы трения недостаточно для приведения в действие нагрузки, блок позволяет скользить. Зависимость между напряжениями в плотной и рыхлой ветвях соответствует уравнению Эйлера. Блок учитывает центробежную загрузку в гибком ремне, инерцию шкива и трение подшипника.
Можно выбрать относительное направление движения ремня. Два конца ремня могут перемещаться в одинаковых или противоположных направлениях. Блок принимает несоответствие ремня и пренебрегает потерями из-за переноса ремня вокруг шкива.
Блочные уравнения моделируют передачу степени между ветвями ремня или к шкиву или от него. Плотные и свободные ветви используют одно и то же вычисление. Без достаточного натяжения силы трения недостаточно для передачи степени между шкивом и ремнем.
Ваша модель действительна, когда оба конца ремня натянуты. Можно выбрать отображение предупреждения в Simulink® Diagnostic Viewer, когда передний конец ремня теряет натяжение. При сборке модели убедитесь, что напряжение сохранено на протяжении всей симуляции. Это можно сделать, добавив массу хотя бы к одному из концов ремня или добавив в модель натяжитель. Используйте средство просмотра переменных, чтобы убедиться, что все пружины, прикрепленные к ремню, натянуты. Для получения дополнительной информации о создании натяжителя, смотрите Лучшие практики для моделирования шкивных сетей.
Кинематические ограничения между шкивом и ремнем:
Когда вы устанавливаете Belt type на V-belt или Flat belt и установите Centrifugal force равным Model centrifugal forceцентробежная сила является:
Когда шкив может перемещаться, уравнение балансировки сил является:
где:
β - знак направления ремня. Когда вы задаете Belt direction Ends move in same direction, β = 1. В противном случае β = -1.
Vrel - относительная скорость между лентой и периферией шкива. Vrel = 0 для идеального корпуса шкива.
VA - линейная скорость ветви A.
VB - линейная скорость ветви B.
VC - линейная скорость шкива в его центре. Если шкив не перемещается, эта переменная фиксируется на 0.
ωS - скорость вращения шкива.
R - радиус шкива.
Fcentrifugal - центробежная сила ремня.
FC - сила, действующая через центроид шкива. Когда вы задаете значение для Inertia, FC включает в себя силу, обусловленную ускорением массы шкива.
ρ - линейная плотность ремня.
Ffr - сила трения между шкивом и ремнем.
FA - сила, действующая вдоль ветви А.
FB - сила, действующая вдоль ветви B.
f - коэффициент трения. Это эквивалентно параметру Contact friction coefficient.
θ - угол переноса контакта.
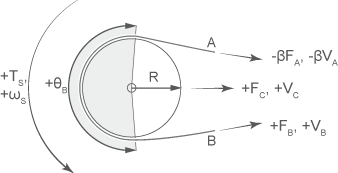
Соглашение о знаке таково, что, когда Belt direction установлено на Ends move in opposite directionположительное вращение в S портов имеет тенденцию давать отрицательное перемещение для A портов и положительное перемещение для B портов.
Для плоского ремня задайте значение f как Contact friction coefficient параметр. Для V-образного ремня блок вычисляет значение как
где:
f' - эффективный коэффициент трения для V-образного ремня.
Φ - угол шкива V-образного ремня.
Коэффициент трения является функцией от относительной скорости, такой что
где
μ - текущее значение коэффициента трения.
f - установившееся значение коэффициента трения.
Vthr - порог скорости трения.
Порог скорости трения управляет шириной области, в которой коэффициент трения изменяет свое значение с нуля на установившийся максимум. Порог скорости трения задает скорость, при которой гиперболический тангенс равен 0,999. Чем меньше значение, тем круче изменение μ.
Блок определяет эффект трения на силу на концах ремня как:
который следует форме формулы Эйтельвейна для трения ремня. Крутящий момент, действующий на шкив:
где:
σ = 1, когда вы задаете Belt type Ideal - No slip. В противном случае,
TS - крутящий момент шкива.
b - вязкое демпфирование подшипника.
Fthr - порог силы.
Блок пренебрегает податливостью по длине ремня.
Оба конца ремня поддерживают достаточное натяжение на протяжении всей симуляции.
Блок рассматривает перемещение центра шкива как плоское, где шкив перемещается вдоль бисекта угла переноса шкива. Центральная скорость VC и сила FC учитывают только компонент вдоль этой линии движения.
Уравнение Эйтельвейна для трения ремня пренебрегает эффектом поступательного движения шкива на трение.


