Степень систему трансмиссии с натяжным ремнем, соединяющим два шкива
Simscape/Driveline/Муфты и приводы

Блок Belt Drive представляет собой пару шкивов, соединенных гибким идеальным, плоским или V-образным ремнем. Идеальный ремень не скользит относительно поверхностей шкива.
Модель рассчитывает трение между гибким ремнем и периферией шкива. Если силы трения недостаточно для приведения в действие нагрузки, модель позволяет скользить. Зависимость между напряжениями в плотной и рыхлой ветвях соответствует уравнению Эйлера. Модель учитывает центробежную загрузку в гибком ремне, инерцию шкива и трение подшипника.
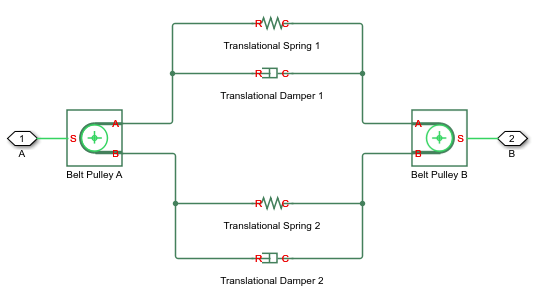
Belt Drive блок - структурный компонент на основе Simscape™ Driveline™ Belt Pulley блок и Simscape <reservedrangesplaceholder5> и Translational Damper блоки. Блоки Translational Spring и Translational Damper моделируют податливость ремня. Для уравнений, регулирующих динамику контакта между ремнем и шкивом, смотрите Belt Pulley блок. Рисунок показывает блок-схему для блока Belt Drive.
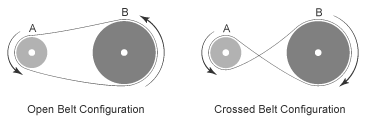
На схемах показаны строения привода с открытым и перекрестным ремнем. В строении открытого ремня оба шкива имеют тенденцию вращаться в одном и том же направлении, и больший шкив имеет больший угол переноса ремня. В строении поперечного ремня шкивы имеют тенденцию вращаться в противоположных направлениях и имеют одинаковый угол переноса.
Схемы ременного привода
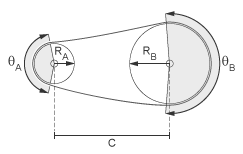
В открытом строении угол переноса ремня вокруг каждого шкива задается выражениями:
где:
θA - угол переноса шкива А.
θB - угол переноса шкива B.
RA - эффективный радиус шкива А.
RB - эффективный радиус шкива B.
C - расстояние между центрами шкивов A и B.
Схема показывает углы и параметры переноса открытой конфигурации.
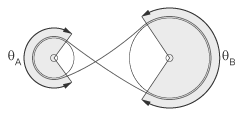
В поперечном строении два угла переноса равны, и угол переноса ремня вокруг каждого шкива равен
Схема показывает углы и параметры переноса замкнутой конфигурации.
Шкивы не перемещаются.
Коэффициент трения и порог скорости трения между ремнем и каждым из шкивов одинаковы.
