Вал с кручением и изгибом податливости
Simscape/Driveline/Муфты и приводы
Блок Flexible Shaft представляет приводной вал с кручением и изгибом податливости. Вал состоит из гибкого материала, который скручивается в ответ на приложенный крутящий момент и изгибается в ответ на статический дисбаланс массы. Скручивающее действие задерживает передачу степени между концами вала, изменяя динамическую характеристику системы привода.
Чтобы представлять гибкий для кручения вал, блок использует метод кусковой массы. Эта модель разделяет вал на различные элементы, которые соединяются между собой через параллельные системы демпфера пружины. Элементы обеспечивают инерцию вала, в то время как системы демпфера пружины обеспечивают податливость вала.
Блок предоставляет четыре метода параметризации, которые позволяют вам моделировать податливость либо в однородном, либо в аксиально неоднородном валу. Аксиально неоднородный вал является таким, для которого любой из этих атрибутов изменяется по длине вала:
Кручение жесткости
Инерция кручения
Жесткость при изгибе
Плотность
Модуль сдвига
Модуль Янга
Внешний диаметр
Внутренний диаметр
Дополнительный параметр позволяет вам смоделировать потери степени в подшипниках из-за вязкого трения на концах вала. Для получения дополнительной информации см. Torsion Модели.
Примечание
Вязкое трение на концах вала отличается от внутреннего демпфирования материала, что соответствует потерям, возникающим в самом материале вала.
Чтобы представлять гибкий вал с изгибом, блок использует или метод кусковой массы, или метод собственных моделей. В то время как метод кусковой массы проще сконфигурировать, метод собственных моделей имеет тенденцию моделировать быстрее.
Совет
Если скорость симуляции, является высоким приоритетом, сначала моделируйте с помощью метода сглаженной массы, корректируя параметры по мере необходимости, пока результаты не совпадут с вашими математическими моделями или экспериментальными данными. Далее моделируйте с помощью метода eigenmodes. Снова корректируйте параметры по мере необходимости до результатов математических моделей или экспериментальных данных. Для примера, который использует оба метода, см. Вал с кручением и поперечной гибкостью.
Для метода кусковой массы количество элементов гибочного вала совпадает с количеством элементов кручения вала. Модель делит вал на ряд таких элементов. Элементы обеспечивают инерцию вала, в то время как матрицы жесткости обеспечивают податливость вала. Метод eigenmodes вычисляет эффективные системы масса-пружина-демпфер, которые представляют режимы изгиба вала. Можно задать количество включаемых режимов и точность форм режимов. И методы кусковой массы, и методы собственных моделей позволяют вам моделировать:
Возбуждающие статические дисбалансы
Концентрически присоединенные твердые массы
До четырёх поддержек расположений вдоль вала
Линейное демпфирование, пропорциональное инерции вала
Линейное демпфирование, пропорциональное жесткости вала
Примечание
Метод собственных моделей принимает, что поддержка является легким по сравнению с жесткостью поддержки.
Статические дисбалансы, которые возбуждают изгиб, возникают, когда центр масс вала или прикрепленная жесткая масса не выровнена с основной осью вала. Можно варьировать местоположения, величины и смещения угла статических дисбалансов на валу.
Можно представлять концентрически прикрепленные твердые массы как диски или идеализированные точки массы. Концентрический диск добавляет диаметральные и полярные моменты инерции к валу и массе к степени свободы перемещения узлов вала. Модель принимает, что диск тонкий, поэтому вал все еще может сгибаться с любой стороны осевого положения вместе с диском. Полярный момент инерции связывает две плоскости изгиба. Концентрическая точка масса является идеализированной версией концентрического диска. Концентрическая масса точки добавляет массу к степеням свободы перемещения узлов вала, но не имеет вращательных моментов инерции. Можно варьировать местоположения и инерцию концентрических дисков или точечных масс, присоединенных к валу.
Можно смоделировать поддержки как идеальные или с помощью матриц жесткости и демпфирования. Для каждой поддержки можно варьировать:
Расположение - Любая точка вдоль длины вала.
Тип - Идеальный зажим, идеальный контакт, свободный, постоянная жесткость и демпфирование подшипника, или зависимая от скорости жесткость и демпфирование.
Число - Два, три, или четыре.
Для обоих методов изгиба можно задать податливость изгиба вала с помощью жесткости изгиба и линейной плотности массы или модуля Юнга и диаметра вала.
Можно параметризовать модель кручения с помощью k жесткости и инерции J или размерностей и свойств материала вала.
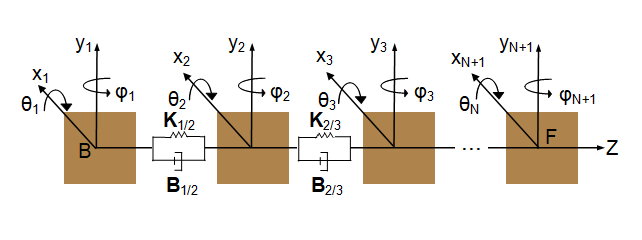
Для модели кручения Flexible Shaft блок аппроксимирует распределенные, непрерывные свойства вала с помощью метода кусковой массы. Модель содержит конечное число, N, последовательно сглаженных инерцией пружинных элементов плюс конечная инерция. Результатом является серия из инерция, соединенная N пружинами вращения и N демпферами вращения.
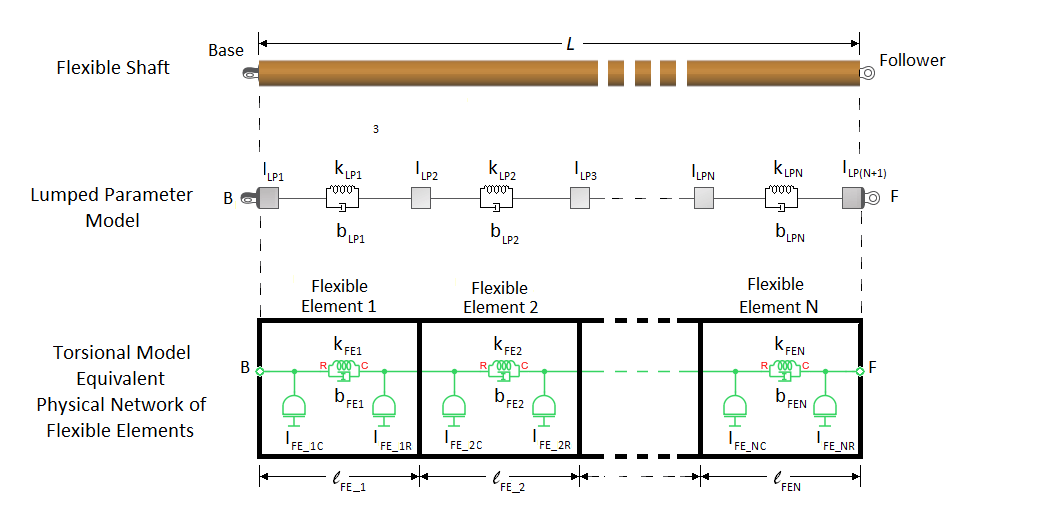
Блок моделирует вал как эквивалентную физическую сеть N гибких элементов. Каждый гибкий элемент FEi представляет собой короткий участок приводного вала и содержит:
Одна пружина, kFE_i, для кручения податливости. Сеть имеет в общей сложности N пружин.
Один демпфер, bFE_i, для демпфирования материала. Сеть имеет в общей сложности N демпферов.
Две инерции, IFE_iC и IFE_iR, для сопротивления вращению. Инерция соседних гибких элементов консолидируется вместе, так что сеть имеет в общей сложности инерция.
Для аксиально однородного вала длины гибкого элемента, податливость, демпфирование и распределенные инерции в физической сети равны, так что:
Для аксиально неоднородного вала величина податливости, демпфирования и инерция R -узлов и C - узлов может различаться для отдельных гибких элементов в модели физической сети.
Баланс между точностью модели и скоростью симуляции зависит от N, количества гибких элементов, которые использует блок, чтобы представлять вал. Для получения информации о балансировке скорости симуляции и точности модели, смотрите Улучшить скорость симуляции или Точность.
Блок позволяет вам задать минимальное количество гибких элементов, Nmin, как значение для параметра Минимальное количество гибких элементов. Однако количество гибких элементов, которые на самом деле использует блок, зависит от сложности вала, который он моделирует. Если блок требует более гибких элементов, чем вы задаете, чтобы решить модель, которая содержит аксиальную неоднородность, промежуточные поддержки, концентрические диски или массы или статические дисбалансы, то .
Например, предположим, что для сложного вала в схеме вы задаете осевые положения для поддержек, статический дисбаланс, сечение большего диаметра и концентрический диск. Вы устанавливаете параметр для Nmin равным 7.
Если гибка модели включена, положения гибкого элемента модели кручения учитывают положения статических дисбалансов и концентрических жестких масс, так что гибкие элементы кручения совпадают с гибкими элементами гибки. Во время симуляции модель кручения не зависит от любых статических дисбалансов или концентрических жестких масс.
Алгоритм для блока определяет количество гибких элементов и длину отдельных элементов, которые требуются для решения симуляции:
Блок помещает один узел в основу и последующий конец вала. Эти узлы считаются фиксированными в осевом положении, потому что они представляют физические сущности вдоль оси вала. На схеме фиксированные узлы показаны красным цветом. Блок равномерно распределяет другие пять (Nmin-2) внутренних узлов по длине вала. Затем он помещает гибкий элемент между каждой последовательной парой узлов.
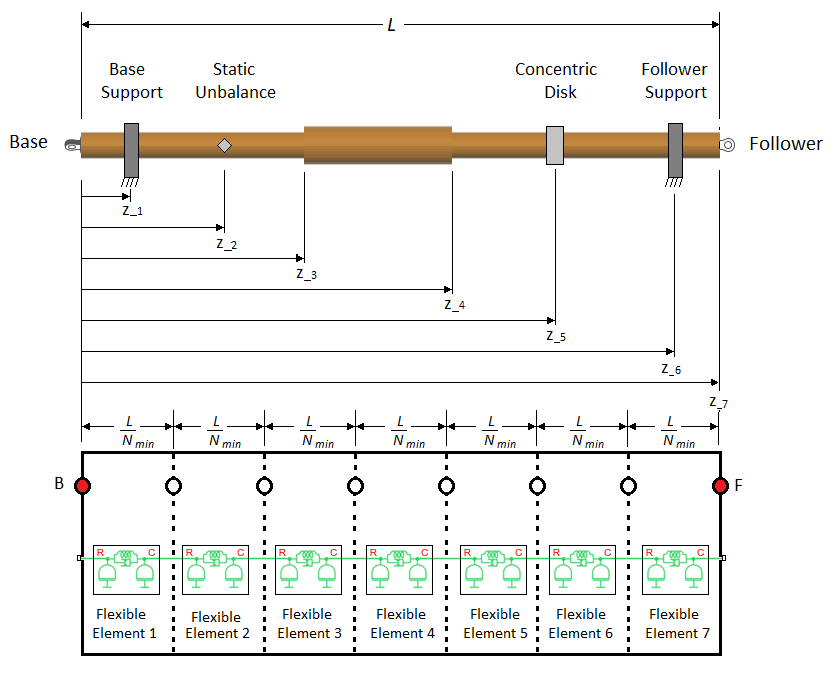
Для поддерживаемого концом, аксиально однородного вала, без статических дисбалансов или присоединенных концентрических дисков, в зависимости от других опций и значений, которые вы задаете, блок может быть в состоянии решить симуляцию, используя только Nmin гибких элементов эквивалентной длины:
Однако в большинстве случаев блок может решить симуляцию, только если добавляет более гибкие элементы.
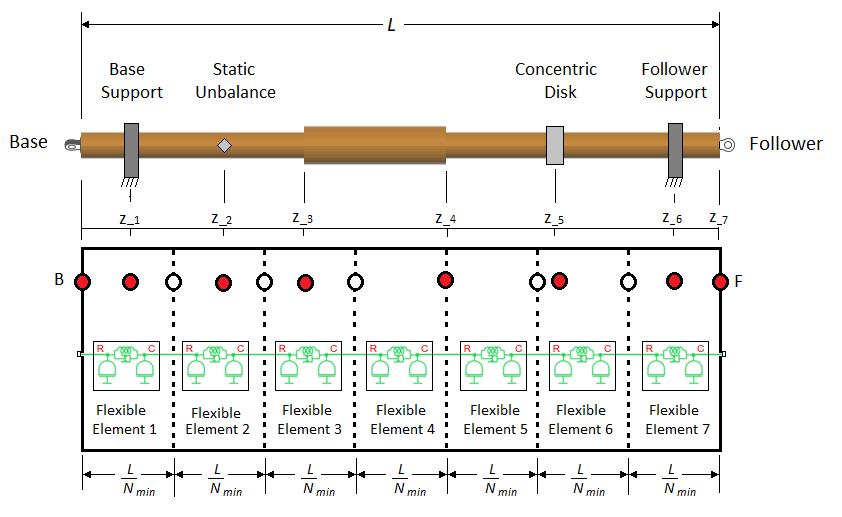
Чтобы добавить более гибкие элементы, блок помещает фиксированные внутренние узлы в эти местоположения:
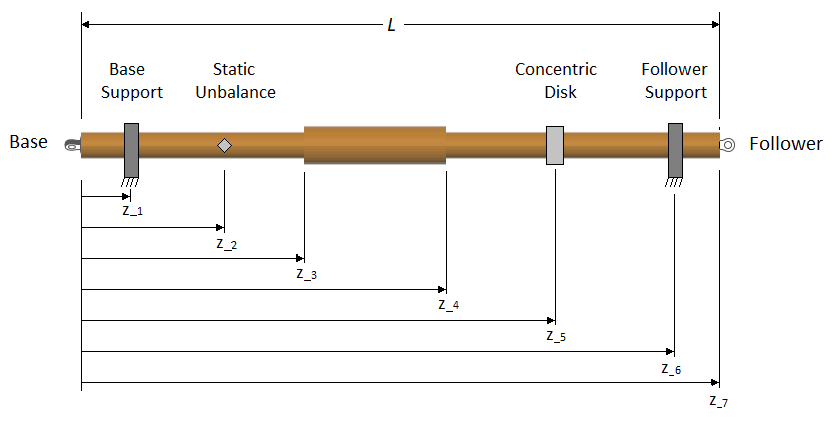
Каждое место поддержки вала. Блок позволяет вам задать количество и расположение поддержек вала. Для вала в схеме предусмотрены поддержки на z1 и z6.
Каждый статический дисбаланс. Для вала в схеме существует статический дисбаланс при z2.
Каждая твердая масса. Твердые массы являются концентрически присоединенными дисками или точечными массами. Для вала в схеме имеется жесткая масса, представленная в виде диска, на z5.
Каждый узел сегментов параметризации. Контуры параметризации являются расположениями вдоль аксиально неоднородного вала, где две соседние секции вала варьируются по жесткости, инерции или геометрии. Блок позволяет вам задать местоположения узлов сегментов параметризации. Для вала в схеме имеются узлы сегментов в z3 и z4.
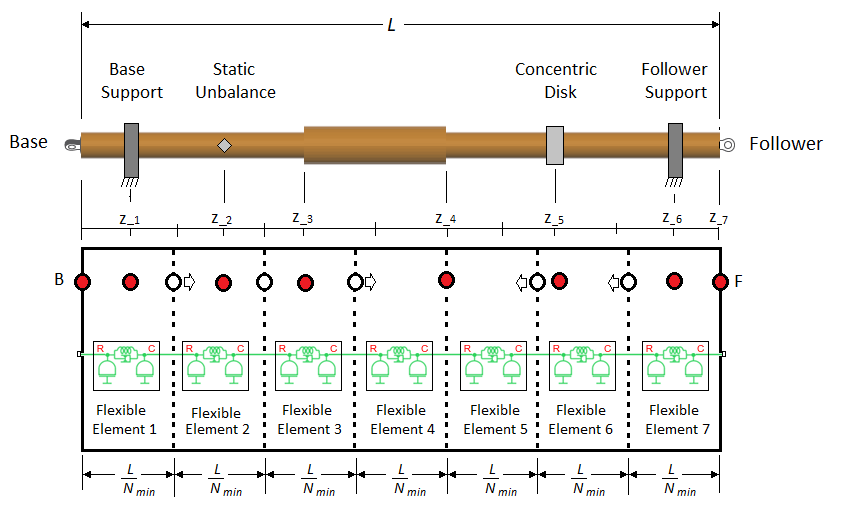
Обратите внимание, что блок не добавил узел в z4, потому что узел уже был добавлен на предыдущем шаге алгоритма. Однако теперь узел фиксирован, потому что он представляет физическую сущность вдоль длины вала.
Блок настраивает положения нефиксированных узлов между фиксированными узлами так, чтобы они были равномерно распределены.
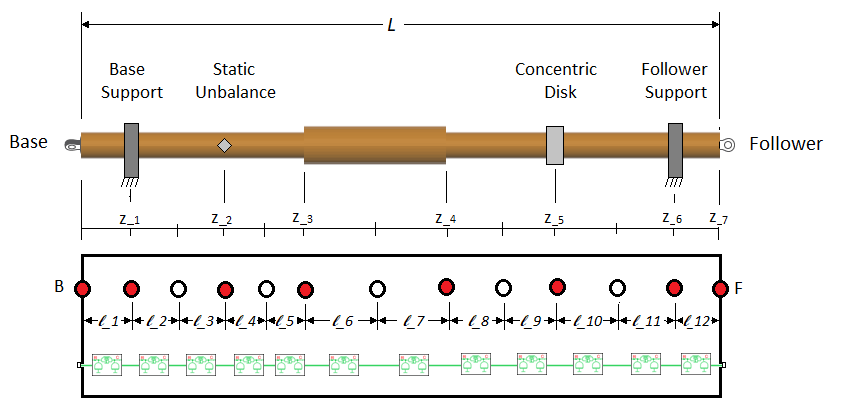
Наконец, блок помещает гибкие элементы между каждым узлом. Длина каждого гибкого элемента соответствует расстояниям между соседними узлами. Блок распределяет инерцию между гибкими элементами на основе длины отдельного элемента и соответствующей геометрии вала. В конечном счете, этот сложный вал представлен 12 гибкими элементами, с , , , , , , и .
Если Nmin достаточно велик, чтобы получить количество нефиксированных узлов, которое больше, чем количество фиксированных узлов, блок распределяет более одного нефиксированного узла между каждым набором соседних фиксированных узлов.
Можно параметризовать модель кручения с помощью жесткости, k и полярного момента инерции, J или размерностей и свойств материала вала.
Жесткость и инерция для каждого элемента вычисляются из размерностей вала и свойств материала как:
где:
JP - полярный момент инерции вала в месте расположения гибкого элемента.
D - внешний диаметр вала в месте расположения гибкого элемента.
d - внутренний диаметр вала в месте расположения гибкого элемента. Для твердого вала, . Для кольцевого вала, .
- длина гибкого элемента.
m - масса вала в месте расположения гибкого элемента.
J - момент инерции вала в месте расположения гибкого элемента.
ρ - плотность материала вала.
G - модуль сдвига упругости материала вала.
k - вращательная жесткость гибкого элемента.
Для любой параметризации кручения внутреннее демпфирование материала определяется коэффициентом затухания, c, для модели с одним гибким элементом с эквивалентной крутящей жесткостью и инерцией. Коэффициент демпфирования тогда , где неповрежденная естественная частота Демпфирующий крутящий момент, приложенный к отдельному гибкому элементу массива модели комкнутой массы, эквивалентен продукту коэффициента демпфирования и относительной скорости вращения этого гибкого элемента.
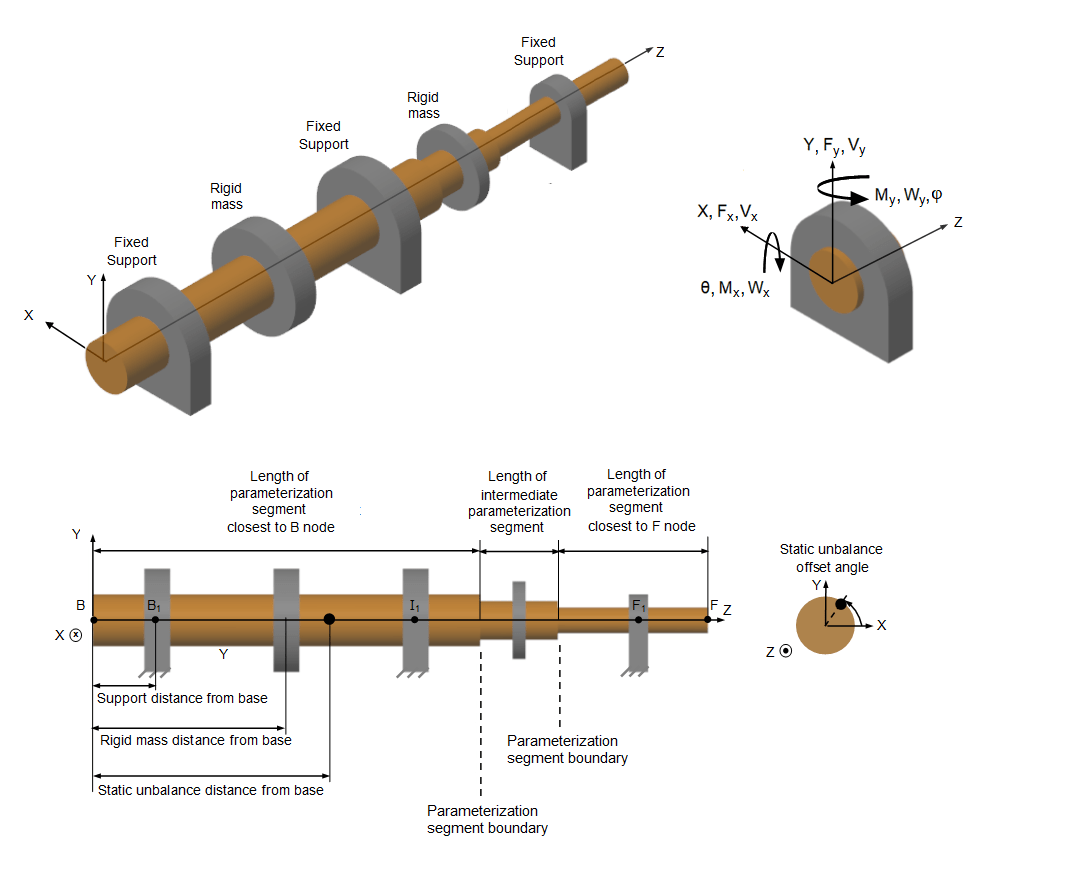
Геометрия вала, Поддержки Загрузки и рисунка Движения показов, как измерить:
Статический угол смещения дисбаланса, который является углом статического дисбаланса вокруг оси вала относительно оси x
Расстояния поддержки, жесткой массы и статического дисбаланса, относительно базового конца вала, B
Параметризация длин сегментов
На рисунке вал имеет три неподвижные поддержки:
B1 - Поддержка конца основы
I1 - Промежуточная поддержка
F1 - Поддержка последующего конца
Вал имеет V поступательной скорости, W скорости вращения и прикладывает силы F и моменты M к поддержкам. Изогнутые стрелы и соглашения о знаках следуют правилу правой руки. Знаки физических сигналов, которые выводит блок, соответствуют стрелам, которые представляют силы, моменты и скорости вала, действующие на поддержки.
Векторные сигналы:
Сила,
Момент,
Поступательная скорость,
Скорость вращения,
Если вал имеет две поддержки, каждый векторный сигнал имеет длину четыре. Сила, например, тогда .
Если вал имеет четыре поддержки, каждый векторный сигнал имеет длину восемь. Сила, например, тогда .
Геометрия вала, опорная загрузка и движение
Как и модель кручения, метод кусковой массы для модели изгиба дискретизирует распределенные непрерывные свойства вала в конечное число, N, гибких элементов. Гибкие элементы N соответствуют кусковые инерции, соединенные последовательно демпфирующими и пружинными элементами. Однако для модели гибки каждая масса имеет четыре степени свободы: перемещение и вращение как в x, так и в y направлениях, перпендикулярных оси вала.
Объединенное массовое уравнение движения [1] является
где:
M является матрица, которая представляет массу вала.
B является матрица для внутреннего демпфирования и поддержки.
GDisk является матрица, которая учитывает дисковую гироскопию
Y - крутящая скорость вала во время симуляции.
K является матрица для жесткости пружины.
является вектор, который представляет степени свободы для всех узлов.
является вектор, который представляет внешние силы от приложения статического дисбаланса массы.
Уравнение для большой матрицы [4] является
где:
является большая матрица для индивидуума гибкого элемента. Для каждого гибкого элемента половина массы и момента инерции передается в узлы на обоих концах гибкого элемента. матрица имеет ненулевые элементы в строки и столбцы:
где:
- длина гибкого элемента вдоль вала между внутренними узлами. Чтобы определить длину каждого гибкого элемента, блок использует алгоритм, который описан в Алгоритме Размещения Узла. Каждый гибкий элемент содержит две инерции. Каждая инерция имеет две поступательные степени свободы, две вращательные степени свободы и одну матрицу жесткости.
Каждый гибкий элемент в эквивалентной физической модели для изгиба в XZ -плане (перемещение луча в X -направление и вращение вокруг оси Y) и в физической модели для изгиба в YZ -плане (перемещение луча в направлении Y и вращение вокруг оси X) затем содержит две массы, две инерции и матрицу жесткости
Чтобы определить местоположения внутренних узлов, и, следовательно, количество и длины гибких элементов, блок использует тот же алгоритм размещения узлов, что и для модели кручения. Для получения дополнительной информации см. «Алгоритм размещения узлов».
m - масса гибкого элемента. m зависит от внешнего, D и внутреннего, d, диаметров, плотности, ρ, вала и длины гибкого элемента, так что .
Id масс полуэлемента момент инерции вокруг оси, перпендикулярной оси вала, зависит от массы, m, длины, и крутящий момент инерции, J, гибкого элемента, такого что .
- суммированные большие матрицы твердых масс, концентрически присоединенные к валу.
Массовые свойства каждой твердой массы, которая концентрично присоединена к валу, добавляются к ближайшему узлу, , таким что
где ID,disk,i - массовый диаметрический момент инерции вокруг оси, перпендикулярной валу, для жесткого диска, прикрепленного к ith узел. Модель принимает, что диск тонкий, поэтому вал все еще может сгибаться с любой стороны осевого положения вместе с диском. Концентрическая масса точки .
Уравнение для демпфирующей матрицы
где:
α - постоянная демпфирования, пропорциональная массе.
β - коэффициент демпфирования, пропорциональный жесткости.
Bsupport - коэффициент демпфирования на каждой поддержке. Для поддержки в ith узел, демпфирующая матрица, с точки зрения глобальных координат, является
где:
- поступательное демпфирование поддержки.
- вращательное демпфирование поддержки.
учитывает гироскопические эффекты любых концентрически присоединенных дисков и определяется как
где IP,disk,i - массовый полярный момент инерции вокруг оси вала для диска, присоединенного к ith узел. Масса полярного момента инерции для концентрической массы точки равна .
Уравнение для матрицы жесткости подшипника
где:
- матрица жесткости для отдельного гибкого элемента вала. Матрица жесткости для гибкий элемент вала, между ith и узлы, имеет ненулевые элементы в строки и столбцы, такие что
где:
- длина гибкого элемента.
EI - жесткость вала.
Ksupport - жесткость на каждой поддержке. Для поддержки в ith узел, матрица жесткости, с точки зрения глобальных координат,
где:
- поддержка поступательная жесткость.
- жесткость вращения поддержки.
Матрица жесткости поддержки, Ksupport, ненулевая, только если вы выбираете Bearing matrix или Speed-dependent bearing matrix для поддержки. Если вы выбираете Clamped тип монтажа, кинематические условия нулевого поворота и перемещения применяются к степеням свободы, соответствующим узлу поддержки (B1, I1, I2 или F1). Если вы выбираете Pinned тип монтирования, кинематические условия нулевого перевода применяются к поступательным степеням свободы, которые соответствуют узлу поддержки (B1, I1, I2 или F1).
Таблица включает граничные условия, применяемые к суженным узлам масс с поддержками.
| Тип поддержки | Граничное условие для уравнения с единичной массой |
|---|---|
Clamped | |
Pinned | |
Bearing Matrix | Ksupport нетривиальна. |
Speed-dependent bearing matrix | Ksupport нетривиальна и зависит от скорости вращения вала. На каждом временном шаге KSupport вычисляется как: где:
|
Матрица, которая представляет степени свободы для всех узлов, , вычисляется таким образом, чтобы степени свободы для ith и узлы
Внешние силы из-за каждого статического дисбаланса массы прикладываются к ближайшему узлу. Усиление в узел есть
где:
mεj является jthстатический дисбаланс, расположенный на ithузел.
J i - скорость вращения вала во время симуляции для ith узел.
φshaft, i - угол поворота скругленной массы кручения для ith узел.
Для метода собственных моделей блок уменьшает динамику изгиба от степени свободы, которые предоставляет метод сгибающей модели с кусковой массой, для M степеней свободы, где M количество режимов.
Блок вычисляет свойства режима изгиба вала во время компиляции модели, затем решает модальные системы масса-пружина-демпфер во время симуляции модели.
Уменьшение степеней свободы в динамике модели и разделение вычислений на задачи во время компиляции и во время выполнения улучшает эффективность симуляции. Метод eigenmodes предполагает, что формы режима не влияют на демпфирование. Поэтому метод лучше всего подходит для моделей, которые включают ограниченное гироскопическое и поддерживающее демпфирование диска.
Во время компиляции блок вычисляет приблизительные демпфированные собственные модели с помощью следующих шагов:
Блок вычисляет матрицы, используя то же кусковое уравнение движения массы, которое он использует для метода сгибающей модели суженной массы:
Для получения дополнительной информации см. Раздел «Модель изгиба Метод кусковой массы».
При определении осевых местоположений узла для , блок использует одну из двух изменений Алгоритма Размещения Узлов, который он использует для модели кручения и метода сгибания модели суженной массы. Изменение, которую использует блок, зависит от того, установлен ли параметр Bending mode determination в настройках Advanced Bending Simscape determined или к User defined.
Если для параметра Bending mode determination задано значение Simscape determined, вместо использования параметра Minimum number of flexible elements для Nmin, как это делают методы кусковой массы, метод eigenmodes вычисляет Nmin как
где:
L - заданное значение в настройках Shaft для параметра Shaft length.
dz - заданное значение в настройках Advanced Bending для параметра Shaft length increments for mode shape computations.
Чтобы вычислить m расшатанные собственные модели и собственные частоты, блок использует eigs функция. Уравнение принимает форму:
[H, λ] = eigs( sparse(K), sparse(M), mMax, 'smallestabs’ ),
H является матрица собственных векторов. Каждый столбец является собственной модой в координаты.
λ являются собственными значениями, которые являются квадратом собственных квот.
mMax - заданное значение в настройках Advanced Bending для параметра Limit number of modes.
Количество вычисленных собственных моделей, m, меньше mMax, если:
Существуют режимы с собственными частотами, которые превышают заданное значение, в настройках Advanced Bending для параметра Eigenfrequency upper limit. Блок отбрасывает эти режимы.
Собственные значения не сходятся. Для получения дополнительной информации см. eigs.
Если для параметра Bending mode determination задано значение User definedблок вычисляет собственный вектор матрицу H из заданных значений, в настройках Advanced Bending, для этих параметров:
X-direction mode shapes
Y-direction mode shapes
Shaft position
Чтобы определить осевые положения узла для блок использует элементы, заданные для параметра Shaft position, в качестве основных узлов.
Чтобы вычислить модальное вращение, θ и φ, для каждого узла, блок использует gradient функция. Уравнения принимают форму:
θ = -gradient(Y direction mode shapes) φ = gradient(X direction mode shapes)
Блок собирает X-direction mode shapes, Y-direction mode shapes и модальные повороты координаты для каждого столбца H.
Блок вычисляет модальные матрицы, MModal, KModal, BModal, GModal, и fModal, как:
Несмотря на то, что блок вычисляет неослабленные собственные модели, H на шаге 1 модальная демпфирующая матрица, BModal и модальная гироскопическая матрица, GModal, могут моделировать световое демпфирование. Блок нормирует матрицы так, чтобы MModal были тождества матрицей.
Во время симуляции блок моделирует собственное уравнение движения:
где модальные степени свободы, , относятся к узлу степеням свободы путем:
Скоростезависимый метод Eigenmodes
Жесткость поддержки и демпфирование поддержки изменяются, если в настройках Supports параметр типа монтажа для любого из поддержек установлен в Speed-dependent bearing matrix. Зависимые от скорости eigenmodes образцовые счета на эти эффекты, изменяя модальные свойства, H, BModal, GModal, KModal, и fModal как скорость вала изменяются. MModal нормировано к тождествам матрице для всех скоростей вала, поэтому это не зависит от скорости вала.
Если вал имеет зависящие от скорости поддержки подшипника, то блок повторяет шаги метода режима изгиба для каждого элемента в векторе скорости вала. Элементы вектора вала являются заданными значениями, в настройках Supports, для параметра Bearing speed [s1,...,sS]. Во время симуляции модальная жесткость, демпфирование и принудительная величина регулируются на основе интерполяционных таблиц свойств в зависимости от скорости вала.
То есть блок моделирует собственное уравнение движения как:
где KModal, BModal и fModal имеют форму:
где:
.Ref - заданное значение, в настройках Supports, для параметра Bearing speed [s1,...,sS].
KModal,Ref представляет собой таблицу модальных жесткостей при каждом
BModal,Ref - таблица поддержки при каждом
GModal,Ref - таблица дискового гироскопического демпфирования при каждом
fModal,Ref является таблицей модальных воздействий на каждый
Блок коррелирует подобие формы режима при различных значениях, и при необходимости переупорядочивает режимы, так что каждая модальная степень свободы, , имеет свойства, которые постепенно изменяются со скоростью вала.
Баланс между точностью симуляции и эффективностью зависит от N, количества гибких элементов, которые используются блоком для представления вала. Точность симуляции является мерой того, насколько результаты симуляции согласуются с математическими и эмпирическими моделями. Как правило, когда N увеличивается, также происходит и верность модели и точность симуляции. Однако вычислительная стоимость симуляции также коррелирует с N, и как только вычислительная стоимость увеличивается, эффективность уменьшается. И наоборот, когда N уменьшается, скорость симуляции увеличивается, но точность симуляции уменьшается.
Чтобы увеличить точность симуляции для метода кусковой массы для модели кручения или изгиба, увеличьте минимальное количество гибких элементов, Nmin. Модель кручения с одним гибким элементом показывает собственную частоту кручения, которая близка к первой собственной частоте непрерывной модели распределенного параметра. Для большей точности можно выбрать 2, 4, 8 или более гибких элементов. Для примера четыре самых низких крутильных собственных требования представлены с точностью 0,1, 1,9, 1,6 и 5,3 процента, соответственно, моделью с 16 гибкими элементами.
Чтобы увеличить точность симуляции для метода eigenmodes к модели гибки:
Если симуляция со статической зависимостью собственной модели от скорости вращения, проверьте, что параметр Nominal shaft speed for bending modes близок к скорости симуляционного вала. Этот параметр может повлиять на результаты модели, если вы параметризоваете жесткий диск, прикрепленный к валу с большим моментом инерции массы вокруг оси вала или задаете любые зависящие от скорости поддержки матрицы подшипника.
Если симуляция с динамической зависимостью собственной модели от скорости вращения, проверьте, что в настройках Supports заданные значения для Bearing speed [s1,...,sS] охватывают диапазон скоростей вала симуляции или что насыщение жесткости поддержки и демпфирования при скоростях вала за пределами области значений является приемлемым приближением.
В настройках Advanced Bending уменьшите значение параметра Shaft length increments for mode shape computations. Уменьшение значения может увеличить точность модальных частот и форм.
Уменьшите демпфирование поддержки и полярный момент инерции диска вокруг оси вала. Simscape™ расчетов форм и частот режима перед симуляцией не учитывают это демпфирование.
Проверьте чувствительность к настройкам Advanced Bending, используя свои параметры в модели гибкого вала в примере Вал с кручением и поперечной гибкостью. Настройте параметры и используйте ссылки, представленные в примере, чтобы изучить, как значения влияют на частоты и формы собственной модели. Скорректируйте значения параметров в модели соответственно.
Увеличьте значения параметров Eigenfrequency upper limit и Limit number of modes. Самая высокая модальная частота в симуляции должна быть значительно больше, чем частота вращения вала.
Распределенная параметром модель непрерывного кручения вала аппроксимируется конечным числом, N, кусковых масс.
Вращение вала и гибкость кручения приводят к изгибу вала, но изгиб не влияет на вращение вала и гибкость кручения.
Твердые точечные массы или диски, прикрепленные к валу, имеют тонкие длины, параллельные оси вала.
Для модели изгиба собственных мод демпфирование не влияет на собственные частоты.
Изгиб вала не передается между блоками Flexible Shaft.
Относительно длины вала наружный диаметр вала невелик.
Относительно длины вала отклонение изгиба невелико.
Статические дисбалансы массы являются единственными внешними возбуждающими нагрузками, изгибающими вал.
Поддержки вала неподвижны.
Рассматриваются гироскопические эффекты жестких дисков; гироскопические эффекты самого вала пренебрегают.
Статический дисбаланс масс в методе собственных моделей использует скорость вращения в средней точке вала.
Если вал моделирует только кручение и использует опции параметризации By stiffness and inertia или By segment stiffness and inertia, то блок использует только две поддержки, по одной на B и F концах.
[1] Adams, M.L. Вращающаяся Вибрация Машины. CRC Press, NY: 2010.
[2] Bathe, K. J. Finite Element Procedures. Prentice Hall, 1996.
[3] Чудновский, В., Д. Кеннеди, А. Мукерджи и Дж. Вендландт. Моделирование гибких тел в SimMechanics и Simulink. MATLAB Digest, Том 14, Номер 3. Май 2006.
[4] Miller, S., T. Soares, Y. Van Weddingen, J. Wendlandt. Моделирование гибких тел с Simscape Multibody. The MathWorks, 2017.
[5] Мушинска, А. Ротординамика. Тейлор и Фрэнсис, 2005
[6] Рао, С.С. Вибрация непрерывных систем. Hoboken, NJ: John Wiley & Sons, 2007.
fminbnd | Inertia | Rod | Rotational Damper | Rotational Spring | Torsional spring damper


