Соединение, которое обеспечивает кинематическое ограничение постоянной скорости между двумя валами
Simscape/Мультитело/Шарниры

Блок Constant Velocity Joint применяет кинематическое ограничение постоянной скорости (CV) между его основой и последующими системами координат, источники совпадают во время симуляции. А именно, если Z - оси основы и систем координат последователя оба зафиксированы относительно общей системы координат, Z - компоненты скоростей вращения этих двух систем координат относительно общей системы координат равны.
Блок имеет две степени свободы, которые позволяют Z-осям основы и последующей системы координат произвольно ориентироваться друг относительно друга. Рисунок показывает пример .
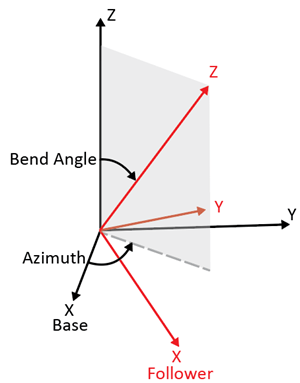
Черная и красная системы координат указывают на основу и последующую системы координат блока. Вращение азимута вокруг оси Z базовой системы координат определяет плоскость, в которой происходит угол поворота. Угол поворота вокруг получившейся Y -оси, красной Y -оси, задает ориентацию Z -оси последующей системы координат относительно Z -оси базовой системы координат.
Блок имеет две параметризации, Rotation Sequence (faster simulation) или Quaternion (allows zero bend angle), для определения внутренних состояний соединения. Используйте параметризацию последовательности поворота, когда это возможно, потому что симуляция с этой параметризацией обычно быстрее, чем симуляция с параметризацией кватерниона. Для получения дополнительной информации см. раздел «Внутреннее состояние».
Можно задать необходимые начальные состояния соединения с параметрами под State Targets, такими как положение и скорость азимута и угол поворота.
Блок обладает различными чувствительными способностями. Вы можете чувствовать азимут, угол поворота и их производные по времени в течение симуляции. Кроме того, можно почувствовать силы и крутящие моменты, которые действуют в соединении, такие как ограничительные силы и полный крутящий момент. Смотрите Композитное Измерение Силы/Крутящего Момента для получения дополнительной информации.
B - Базовая система координатПорт сопоставлен с базовой системой координат блока соединений. В типичных приложениях, где CV-соединение соединяет два вала, Z ось базовой системы координат выровнена с ведущим валом.
F - Последующая система координатПорт сопоставлен с последующей системой координат блока соединений. В типичных приложениях, где CV-соединение соединяет два вала, Z ось последующей системы координат выровнена с ведомым валом.
mode - Входной сигнал, управляющий режимом соединенияВходной сигнал, который управляет режимом соединения, задается как безъядерный скаляр. Режим соединения нормален, когда входной сигнал равен 0, и отключен, когда входной сигнал равен -1. Режим соединения может быть изменен много раз во время симуляции.
Чтобы включить этот порт, в разделе Mode Configuration задайте Mode Provided by Input.
qb - Угол поворотаУгол поворота CV-соединения, возвращаемый в виде скаляра. Эта величина является углом между Z -осями основы и последующей системы координат блока.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Bend Angle, выберите Position.
wb - Скорость угла поворотаСкорость угла поворота CV-соединения, возвращаемая в виде скаляра. Эта величина равна производной по времени от сигнала, выводимого из порта qb.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Bend Angle, выберите Velocity.
bb - Ускорение угла поворотаУскорение угла поворота CV-соединения, возвращаемое в виде скаляра. Эта величина равна второй производной по времени от сигнала, выводимого из порта qb.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Bend Angle, выберите Acceleration.
qa - АзимутАзимут CV-шарнира, возвращается в виде скаляра. Эта величина является углом поворота вокруг Z оси базовой системы координат. Вращение определяет плоскость, в которой происходит угол поворота.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Azimuth, выберите Position.
wa - Скорость азимутаСкорость азимута CV-соединения, возвращаемая в виде скаляра. Эта величина равна производной по времени от сигнала, выводимого из порта qa.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Azimuth, выберите Velocity.
ba - Ускорение азимутаУскорение азимута CV-соединения, возвращаемое в виде скаляра. Эта величина равна второй производной по времени от сигнала, выводимого из порта qa.
Чтобы включить этот порт, в разделе Constant Velocity Primitive (CV) > Sensing > Azimuth, выберите Acceleration.
fc - Ограничительная силаОграничительная сила, которая действует в соединении, возвращается как скаляр. Сила поддерживает поступательные ограничения соединения. Дополнительные сведения см. в разделе Силы ограничения чувств.
Чтобы включить этот порт, в разделе Composite Force/Torque Sensing выберите Constraint Force.
tc - Ограничительный крутящий моментОграничительный крутящий момент, действующий в соединении, возвращается как скаляр. Крутящий момент поддерживает вращательные ограничения соединения. Для получения дополнительной информации см. раздел «Измерение силы и крутящего момента».
Чтобы включить этот порт, в разделе Composite Force/Torque Sensing выберите Constraint Torque.
ft - Общая силаОбщая сила, действующая в суставе, возвращается как скаляр. Общая сила является суммой сил, передаваемых от одной системы координат к другому через соединение. Сила включает в себя приведение в действие, внутренние и ограничительные силы. Для получения дополнительной информации см. раздел «Измерение силы и крутящего момента».
Чтобы включить этот порт, в разделе Composite Force/Torque Sensing выберите Total Force.
tt - Полный крутящий моментПолный крутящий момент, действующий в соединении, возвращается как скаляр. Полный крутящий момент - это сумма крутящих моментов, передаваемых от одной системы координат к другому через соединение. Крутящий момент включает в себя приведение в действие, внутренние и ограничительные моменты. Для получения дополнительной информации см. раздел «Измерение силы и крутящего момента».
Чтобы включить этот порт, в разделе Composite Force/Torque Sensing выберите Total Torque.
Internal State - Внутренняя параметризация соединенияRotation Sequence (faster simulations) (по умолчанию) | Quaternion (allows zero bend angle)Выберите параметризацию, чтобы задать внутренние состояния соединения.
Rotation Sequence (faster simulations)Блок Constant Velocity Joint использует параметризацию последовательности поворота Z-Y-Z. Угол поворота второй Z -оси является отрицательным углом поворота первой Z -оси.
Используйте этот метод по возможности, потому что симуляция с этой параметризацией обычно быстрее, чем симуляция с параметризацией кватерниона. Однако параметризация последовательности поворота Z-Y-Z имеет кинематическую особенность, когда угол поворота равен нулю. Если требуется нулевой угол поворота, установите Internal State равным Quaternion (allows zero bend angle).
Quaternion (allows zero bend angle)Блок Constant Velocity Joint использует параметризацию кватерниона. Чтобы применить кинематическое ограничение CV, четвертый компонент кватерниона, Z-компонент векторной части, всегда равен нулю.
Используйте этот метод, когда требуется нулевой угол поворота. Этот метод не имеет кинематической особенности при нулевом угле поворота, но имеет кинематическую особенность, когда угол поворота равен 180 степеням. Симуляция с этой параметризацией обычно медленнее, чем симуляция с Z-Y-Z параметризацией.
State Targets > Specify Position Target - Задавать ли цель положенияoff (по умолчанию) | onВыберите этот параметр, чтобы включить параметры для определения положения цели соединения.
State Targets > Specify Position Target > Priority - Приоритетный уровень целевого положенияHigh (desired) (по умолчанию) | Low (approximate)Установите уровень приоритета цели положения. Для получения дополнительной информации см. раздел «Направляющая сборка».
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Position Target.
State Targets > Specify Position Target > Value - Углы для определения положения целиBend Angle Only (по умолчанию) | Bend Angle and AzimuthЗадавать ли цель положения CV-соединения в начале симуляции можно только с помощью угла поворота или угла поворота и азимута.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Position Target.
State Targets > Specify Position Target > Value > Bend Angle - Угол поворота для заданияdeg (по умолчанию)Задайте угол поворота CV-соединения.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Position Target.
State Targets > Specify Position Target > Value > Azimuth - Азимут для определения0 <reservedrangesplaceholder0> (по умолчанию)Задайте азимут CV-соединения.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets > Specify Position Target > Value, выберите Bend Angle and Azimuth.
State Targets > Specify Velocity Target - Задавать ли цель скоростиoff (по умолчанию) | onВыберите этот параметр, чтобы включить параметры для определения цели скорости соединения.
State Targets > Specify Velocity Target > Priority - Приоритетный уровень заданного значения скоростиHigh (desired) (по умолчанию) | Low (approximate)Установите уровень приоритета цели скорости. Для получения дополнительной информации см. раздел «Направляющая сборка».
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Velocity Target.
State Targets > Specify Velocity Target > Value - Параметры для задания цели скоростиBend Angle Only (по умолчанию) | Bend Angle and AzimuthЗадавать ли цель скорости CV-соединения в начале симуляции можно только с помощью угла поворота или угла поворота и азимута.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Velocity Target.
State Targets > Specify Velocity Target > Value > Bend Angle - Задает угловую скорость поворота0 <reservedrangesplaceholder0> (по умолчанию)Задайте угловую скорость поворота CV-соединения.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets, выберите Specify Velocity Target.
State Targets > Specify Velocity Target > Value > Azimuth - Азимутальная скорость для определения0 <reservedrangesplaceholder0> (по умолчанию)Задайте азимутальную скорость CV-соединения.
Чтобы включить этот параметр, в разделе Constant Velocity Primitive (CV) > State Targets > Specify Velocity Target > Value, выберите Bend Angle and Azimuth.
Sensing > Bend Angle > Position - Чувствовать ли угол поворотаВыберите этот параметр, чтобы включить qb портов.
Sensing > Bend Angle > Velocity - Измерять ли скорость угла поворотаВыберите этот параметр, чтобы включить wb портов.
Sensing > Bend Angle > Acceleration - Ощущать ли ускорение угла поворотаВыберите этот параметр, чтобы включить bb портов.
Sensing > Azimuth > Position - Чувствовать ли азимутВыберите этот параметр, чтобы включить qa портов.
Sensing > Azimuth > Velocity - Измерять ли скорость азимутаВыберите этот параметр, чтобы включить wa портов.
Sensing > Azimuth > Acceleration - Ощущать ли ускорение азимутаВыберите этот параметр, чтобы включить ba портов.
Mode - Режим соединенияNormal (по умолчанию) | Disengaged | Provided by InputЗадайте режим соединения для симуляции.
| Метод | Описание |
|---|---|
Normal | Соединение ведет себя нормально на протяжении всей симуляции. |
Disengaged | Соединение разъединяется в течение всей симуляции. |
Provided by Input | Эта опция открывает порт mode, который можно подключить к входному сигналу, чтобы изменить режим соединения во время симуляции. Режим соединения нормален, когда входной сигнал равен 0, и отключен, когда входной сигнал равен -1. Режим соединения может быть изменен много раз во время симуляции. |
Direction - Направление измеренияFollower on Base (по умолчанию) | Base on FollowerСилы и крутящие моменты, которые последующая система координат оказывает на базовую систему координат или базовую систему координат, влияют на последующую систему координат. Противоположное направление изменяет знак измерений. Для получения дополнительной информации см. раздел «Направление измерения силы и крутящего момента».
Follower on BaseОпределите силу и крутящий момент, которые последующая система координат оказывает на базовую систему координат.
Base on FollowerОпределите силу и крутящий момент, которые базовая система координат оказывает на последующую систему координат.
Resolution Frame - Система координат для разрешения измеренийBase (по умолчанию) | FollowerСистема координат, используемый для разрешения измерений. Выбор имеет значение только в том случае, если соединение имеет вращательные степени свободы.
BaseБлок соединений разрешает измерения в координатах базовой системы координат.
FollowerБлок соединений разрешает измерения в координатах последующей системы координат.
Constraint Force - Чувствовать ли ограничительную силу в соединенииВыберите этот параметр, чтобы включить fc портов.
Constraint Torque - Чувствовать ли ограничительный крутящий момент в соединенииВыберите этот параметр, чтобы включить tc портов.
Total Force - Ощущать ли общую силу в соединенииВыберите этот параметр, чтобы включить ft портов.
Total Torque - Чувствовать ли полный крутящий момент в соединенииВыберите этот параметр, чтобы включить tt портов.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

