Перемещение системы координат можно измерить в различных системах координат. К ним относятся Декартовы, цилиндрические и сферические системы. Различные системы координат доступны через блок Transform Sensor и, в ограниченной степени, через блоки соединений. Выбор системы координат зависит от модели. Выберите систему координат, которая наиболее удобна для вашего приложения.
Перевод является относительной величиной. Перемещение одной системы координат имеет значение только относительно другой системы координат. Как таковые, блоки с возможностью измерения смещения требуют двух систем координат для измерения: измеренных и опорных систем координат. В этих блоках порт последующей системы координат идентифицирует измеренную систему координат; порт базовой системы координат идентифицирует опорную систему координат измерения.
Некоторые измерения являются общими для нескольких систем координат. Одним из примеров является координата Z, которая существует как в Декартовой, так и в цилиндрической системах. В диалоговом окне Датчик преобразования (Transform Sensor) координаты, составляющие более одной системы координат, появляются только один раз. Выбор Z выводит перемещение вдоль оси Z как в Декартовой, так и в цилиндрической системах координат.
Другие измерения отличаются, но имеют то же имя. Для примера радиус является координатой как в сферической, так и в цилиндрической системах. Сферический радиус отличается от цилиндрического радиуса: первый - расстояние между двумя исходными системами координат; последняя является расстоянием между началом одной системы координат и осью Z системы координат.
Чтобы дифференцировать две радиальные координаты, Simscape™ Multibody™ использует следующее соглашение:
Радиус - Цилиндрическая радиальная координата
Расстояние - Сферическая радиальная координата
Декартова система координат использует три линейные координаты - X, Y и Z - соответствующие трем взаимно ортогональным осям. Декартовы измерения преобразования имеют модули измерения расстояния, причем метр является значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать другую физическую единицу измерения при интерфейсе с Simulink® блоки.
![]()
Можно выбрать любую из Декартовых осей в Датчике Преобразования для измерения перемещения. Это верно, даже если перемещение ограничено любой из декартовых осей. Выбор Декартовых осей открывает порты физического сигнала x, y и z, соответственно.
С помощью блоков соединений можно чувствовать перемещение вдоль каждой призматической примитивной оси. Выбор параметра измерения из призматического примитивного меню открывает соответствующий порт физического сигнала. Для примера, если вы выбираете Position из Z Prismatic Primitive (Pz) Декартова Блока соединений, блок выставляет порт физического сигнала z.
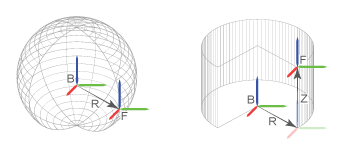
В цилиндрической системе координат используются одна угловая и две линейные координаты. Линейные координаты - цилиндрический радиус, R, и длина, Z. Угловая координата - азимут, ϕ, об оси длины. Линейные координаты имеют модули измерения расстояния, причем метр является значением по умолчанию. Угловая координата имеет модули измерения угла, при этом радиан является значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать другую физическую единицу измерения при взаимодействии с блоками Simulink.
![]()
Только блок Transform Sensor может воспринимать перемещение системы координат в цилиндрических координатах. В диалоговом окне этого блока можно выбрать одну или несколько цилиндрических координат для измерения. Цилиндрические координаты называются Z, Radius и Azimuth. Выбор цилиндрических координат открывает порты физического сигнала z, рад и азм, соответственно.
Примечание
Z принадлежит как Декартовой, так и цилиндрической системам.
В сферической системе координат используются две угловые координаты и одна линейная координата. Линейная координата - сферический радиус R. Угловые координаты - азимут, Линейная координата имеет модули измерения расстояния, причем метр является значением по умолчанию. Угловые координаты имеют модули измерения угла, при этом радиан является значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать другую физическую единицу измерения при взаимодействии с блоками Simulink.
![]()
Только блок Transform Sensor может ощущать перемещение системы координат в сферических координатах. В диалоговом окне этого блока можно выбрать одну или несколько сферических координат для измерения. Сферические координаты называются Azimuth, Distance и Inclination. Выбор сферических координат открывает порты физического сигнала azm, dst и inc, соответственно.
Примечание
Azimuth относится как к цилиндрической, так и к сферической системам. Distance - сферический радиус.
