Наблюдатель Luenberger в дискретном времени
Simscape / Электрический / Контроль / Наблюдатели
Блок Luenberger Observer реализует наблюдателя Luenberger в дискретном времени. Используйте этот блок для оценки состояний наблюдаемой системы с помощью:
Дискретные входы и выходы системы.
Дискретное представление системы в пространстве состояний.
Luenberger Observer также иногда упоминается как государственный наблюдатель или просто как наблюдатель.
Можно управлять мультивходами, несколькими выходами путем передачи вектора выходного состояния этого блока в блок State Feedback Controller.
Блок реализует дискретное время Luenberger Observer с использованием обратного метода Эйлера из-за его простоты и устойчивости.
Оценка задается этим разностным уравнением:
где:
является kth вычисленный вектор состояния.
является kth вычисленный выходной вектор.
u(k) является kth входной вектор.
y(k) является kth измеренный выходной вектор.
Ad - дискретизированная матрица состояний.
Bd - дискретизированная входная матрица.
Ld - дискретизированная матрица усиления наблюдателя.
Динамика ошибки расчета описывается:
где:
e(k) является kth вектор ошибок.
Cd - выходная матрица.
Ошибка расчета сходится к нулю, когда Ad-LdCd имеет свои собственные значения внутри модуля круга. Поэтому значение Ld должна быть такой, чтобы эта цель была достигнута. Блок вычисляет коэффициент усиления наблюдателя путем решения
где G является произвольной матрицей, и X получается путем решения уравнения Сильвестра:
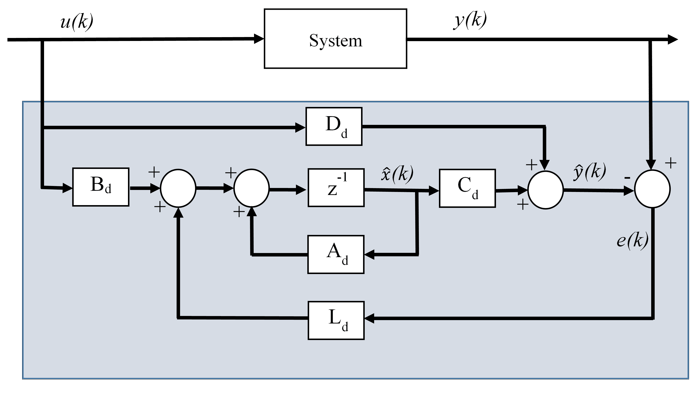
Здесь Λ матрица с желаемыми собственными значениями, которые не совпадают с собственными значениями Ad. Эта схема показывает базовую структуру дискретного времени Luenberger Observer.
Система наблюдаема, что верно, если состояние системы может быть определено из входа и выхода за конечное время. Математически это означает, что матрица наблюдаемости системы имеет полный ранг.
Желаемые собственные значения не совпадают с собственными значениями модели без разомкнутого контура.
[1] Luenberger, D. G. «An Introduction to Observers». Транзакции IEEE по автоматическому управлению. Том 16, № 6, 1971, стр. 596-602.
[2] Алессандри, А. и П. Колетта. «Проект наблюдателей Luenberger для класса гибридных линейных систем». Международный практикум по гибридным системам: Расчеты и управление, Берлин, март 2001 года.
[3] Варга, А. «Назначение робастного шеста через параметризацию обратной связи на основе уравнения Сильвестра». В Computer-Aided Control System Design, стр. 13-18., Anchorage, Alaska, 2000.



