Наблюдатель потока асинхронной машины для векторного управления
Simscape / Электрический / Контроль / Наблюдатели
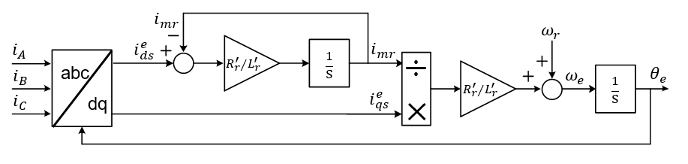
Блок Induction Machine Flux Observer получает синхронную скорость, ωe и электрический угол, θe, которые требуются для выполнения векторного управления ротором (FOC). Рисунок показывает эквивалентную схему для наблюдателя.
Чтобы определить синхронную скорость и электрический угол, блок Induction Machine Flux Observer использует следующие отношения:
и
в этих комбинированных формах:
и
где:
является d потоком ротора оси.
- ток намагничивания.
и являются d токами статора - ось и q - ось.
и являются токами ротора d оси и q оси.
- синхронная скорость.
- механическая скорость вращения.
- сопротивление ротора, относящееся к стороне статора.
- индуктивность утечек ротора, относящаяся к стороне статора.
индуктивность намагничивания.
[1] Vas, P. Electrical Machines and Drives: A Space-Vector Theory Approach. New York: Oxford University Press, 1992.

