Режим external mode включает Simulink® моделирует на вашем хосте-компьютере связь с развернутой моделью на оборудовании робота во время выполнения. Используйте режим external mode для просмотра сигналов или изменения параметров маски блоков на развернутой модели Simulink. Настройка параметра во режиме external mode помогает вам вносить корректировки в свои алгоритмы, так как они запускаются на оборудовании, в отличие от в симуляции в самом Simulink. В этом примере показано, как использовать режим external mode с примером управления с обратной связью робота с поддержкой ROS, когда модель развертывается на оборудовании робота.
Сконфигурируйте модель Simulink, чтобы развернуть на оборудовании робота и включить режим external mode.
Откройте модель.
robotROSFeedbackControlExample
Установите параметры конфигурации модели.
В разделе Prepare под вкладкой ROS нажмите Hardware Settings, чтобы открыть диалоговое окно параметров конфигурации модели.
На панели Solver установите для Type значение Fixed-step и Fixed-step size для 0.05.
В Target Hardware Resources установите параметры External mode. Чтобы расставить приоритеты скорости выполнения модели, включите Run external mode in a background thread. Нажмите OK.
Щелкните Deploy под вкладкой ROS. Затем под Deployment нажмите Build & Run. По умолчанию Simulink всегда использует Build and run при использовании режима external mode.
В модели установите Simulation mode равной External.
В модели добавьте блоки scope к сигналам, которые вы хотите просмотреть. В данном примере добавьте XY Graph (Simulink) возможности к X и Y сигналы, которые выходят из Bus Selector от абонента ROS, который контролирует положение робота. Откройте блок XY Graph и измените минимальное и максимальное значения для каждой оси на [-10 10].
Теперь, когда модель сконфигурирована, можно развернуть и запустить модель на оборудовании робота.
Подключитесь к сети ROS путем установки сетевого адреса. Сеть должна работать на целевом робототехническом оборудовании. Этот пример использует окружение симулятора Gazebo Empty из виртуальной машины с ROS Hydro и Gazebo. На вкладке Simulations выберите ROS Network, чтобы сконфигурировать сетевой адрес ROS. Укажите адрес устройства путем выбора Custom под Network Address и указанием IP-адреса или имени хоста под Hostname/IP Address. Для этой виртуальной машины IP-адрес 192.168.154.131.
Запустите модель. Модель развертывается на оборудовании робота и запускается после завершения процесса сборки. Этот шаг может занять некоторое время.
После того, как вы развернете модель, и модель работает, можно просмотреть ее сигналы и изменить ее параметры.
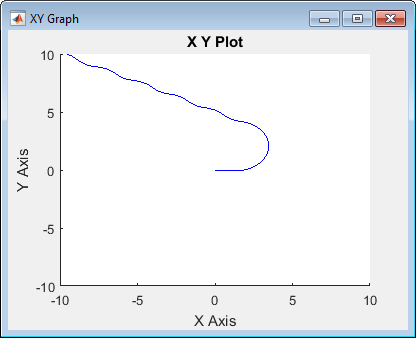
Пока модель запускается на оборудовании, просмотрите окно XY Graph (Simulink), чтобы контролировать положение робота с течением времени.
Путь имеет небольшое колебание, что связано с высокой скоростью робота, когда он отслеживает путь.
Пока модель все еще работает, можно также настроить параметры. Откройте Proportional Controller и смените ползунок Linear Velocity на 0.25. Вернемся к основной модели, смените Desired Position блок константы на новое положение, [0 -5]. Робот едет в новое положение медленнее.
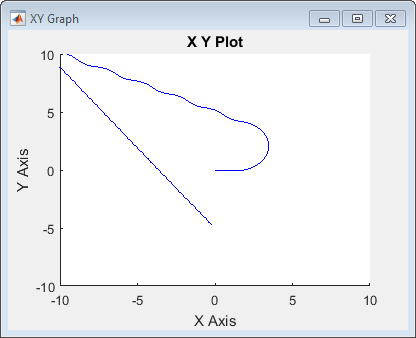
Пониженная скорость уменьшает колебание вдоль пути. Все эти модификации были сделаны, пока модель была развернута на оборудовании.
