Создание оптимального КИХ-фильтра Parks-McClellan
Используйте алгоритм Паркса-Макклеллана, чтобы спроектировать полосно-пропускающий фильтр конечную импульсную характеристику порядка 17. Задайте нормированные частоты диапазона остановок и рад/выборка и нормированные частоты полосы пропускания и рад/образец. Постройте график идеальных и фактических величин реакций.
f = [0 0.3 0.4 0.6 0.7 1]; a = [0 0 1 1 0 0]; b = firpm(17,f,a); [h,w] = freqz(b,1,512); plot(f,a,w/pi,abs(h)) legend('Ideal','firpm Design') xlabel 'Radian Frequency (\omega/\pi)', ylabel 'Magnitude'

Проектируйте lowpass с частотой отключения полосы пропускания 1500 Гц и частотой отключения полосы пропускания 2000 Гц. Задайте частоту дискретизации 8000 Гц. Требуйте максимальную амплитуду полосы упора 0,01 и максимальную ошибку полосы пропускания (пульсацию) 0,001. Получите необходимый порядок фильтра, нормированные ребра полосы частот, амплитуды полосы частот и веса с помощью firpmord.
[n,fo,ao,w] = firpmord([1500 2000],[1 0],[0.001 0.01],8000); b = firpm(n,fo,ao,w); fvtool(b,1)

Используйте алгоритм Паркса-Макклеллана, чтобы создать полосовой фильтр конечной импульсной характеристики 50-го порядка для использования с сигналами, дискретизированными на частоте 1 кГц.
N = 50; Fs = 1e3;
Указать, что диапазон пропускания охватывает частоты между 200 Гц и 300 Гц и что переходная область с каждой стороны полосы пропускания имеет ширину 50 Гц.
Fstop1 = 150; Fpass1 = 200; Fpass2 = 300; Fstop2 = 350;
Проектируйте фильтр так, чтобы оптимизация подгонки взвешивала низкочастотную полосу стопора с весом 3, полосу пропускания с весом 1 и высокочастотную полосу стопора с весом 100. Отобразите величину ответ фильтра.
Wstop1 = 3;
Wpass = 1;
Wstop2 = 100;
b = firpm(N,[0 Fstop1 Fpass1 Fpass2 Fstop2 Fs/2]/(Fs/2), ...
[0 0 1 1 0 0],[Wstop1 Wpass Wstop2]);
fvtool(b,1)
Если создание фильтра не сходится, создание фильтра может быть неправильным. Проверьте проект путем проверки частотной характеристики.
Если ваше создание фильтра не сходится и полученное создание фильтра не верно, попробуйте одно или несколько из следующих:
Увеличьте порядок фильтра.
Расслабьте создание фильтра путем уменьшения ослабления в полосах стопоров и/или расширения переходных областей.
firpm проектирует КИХ-фильтр линейной фазы с помощью алгоритма Паркса-Макклеллана [2]. Алгоритм Паркса-Макклеллана использует алгоритм обмена Ремеза и теорию приближения Чебышёва для разработки фильтров с оптимальной подгонкой между желаемой и фактической частотными характеристиками. Фильтры оптимальны в том смысле, что максимальная ошибка между желаемой частотной характеристикой и фактической частотной характеристикой минимизирована. Фильтры, разработанные таким образом, показывают поведение equiripple в своих частотных характеристиках и иногда называются фильтрами equiripple. firpm проявляет разрывы в голове и хвосте своей импульсной характеристики из-за этого свойства равновесия.
Это тип I (n нечетный) и тип II (n четные) линейно-фазовые фильтры. Векторы f и a задайте частотно-амплитудные характеристики фильтра:
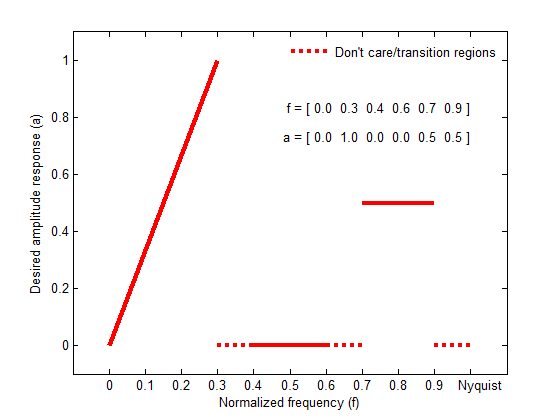
f является вектором пар частотных точек, заданных в области значений от 0 до 1, где 1 соответствует частоте Найквиста. Частоты должны быть в порядке возрастания. Повторяющиеся частотные точки разрешены и, фактически, могут использоваться, чтобы спроектировать фильтр точно так же, как те, которые возвращаются fir1 и fir2 функции с прямоугольной (rectwin) окно.
a - вектор, содержащий необходимую амплитуду в точках, заданных в f.
Желаемая амплитудная функция на частотах между парами точек (f (k) , f (k + 1)) для k нечетной является сегментом линии, соединяющим точки (f (k), a (k)) и (f (k + 1), a (k + 1)).
Желаемая амплитудная функция на частотах между парами точек (f (k) , f (k + 1)) для k даже не задана. Это переходные или «не заботятся» области.
f и a имеют одинаковую длину. Эта длина должна быть четным числом.
Рисунок ниже иллюстрирует связь между f и a векторы в определении желательной амплитудной характеристики.
firpm всегда использует четный порядок фильтра для строений с четной симметрией и ненулевой полосой пропускания на частоте Найквиста. Причина четного порядка фильтра в том, что для импульсных характеристик, проявляющих четную симметрию и нечетные порядки, частотная характеристика на частоте Найквиста обязательно равна 0. Если вы задаете нечетное n, firpm увеличивает его на 1.
firpm проектирует линейно-фазовые фильтры I, II, III и IV типов. Тип I и тип II являются значениями по умолчанию для n четные и n нечетный, соответственно, в то время как тип III (n четный) и тип IV (n нечетные) заданы как 'hilbert' или 'differentiator' , соответственно, используя ftype аргумент.. Различные типы фильтров имеют различные симметрии и определенные ограничения на их частотные характеристики. (Для получения дополнительной информации см. раздел [3].)
| Тип линейного фазового фильтра | Порядок фильтрации | Симметрия коэффициентов | Ответные H(f), f =0 | Ответные H(f), f =1 (Nyquist) |
|---|---|---|---|---|
Тип I | Даже | четные: | Никаких ограничений | Никаких ограничений |
Тип II | Странный | четные: | Никаких ограничений | H (1
|
Тип III | Даже | нечетные: | H (0 | H (1 |
| Тип IV | Странный | нечетные: | H (0 | Никаких ограничений |
Можно также использовать firpm чтобы записать функцию, которая задает необходимую частотную характеристику. Предопределенный указатель на функцию частотной характеристики для firpm является @firpmfrf, который проектирует КИХ-фильтр линейной фазы.
Примечание
b = firpm(n,f,a,w) эквивалентно b = firpm(n,f,{@firpmfrf,a},w), где, @firpmfrf является предопределенным указателем на функцию частотной характеристики для firpm. При желании можно написать собственную функцию ответа. Использование help
private/firpmfrf и см. «Создание указателя на функцию» для получения дополнительной информации.
[1] Комитет по цифровой обработке сигналов Общества акустики, речи и обработки сигналов IEEE, eds. Выбранные документы в цифровой обработке сигналов. Vol. II. New York: IEEE Press, 1976.
[2] Комитет по цифровой обработке сигналов Общества акустики, речи и обработки сигналов IEEE, eds. Программы для цифровой обработки сигналов. Нью-Йорк: IEEE Press, 1979, алгоритм 5.1.
[3] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Обработка сигнала в дискретном времени. Верхний Седл-Ривер, Нью-Джерси: Prentice Hall, 1999, с. 486.
[4] Parks, Thomas W., and C. Sidney Burrus. Создание цифровых фильтров. Нью-Йорк: Джон Уайли и сыновья, 1987, стр. 83.
[5] Рабинер, Лоуренс Р., Джеймс Х. Макклеллан и Томас В. Паркс. Конечная импульсная характеристика Создания цифровых фильтров техники с использованием взвешенных чебышевских Приближений. Материалы IEEE®. Том 63, № 4, 1975, стр. 595-610.
butter | cfirpm | cheby1 | cheby2 | ellip | fir1 | fir2 | fircls | fircls1 | firls | firpmord | rcosdesign | yulewalk
