Моделируйте фильтры с бесконечной импульсной характеристикой (БИХ)
Simulink/Дискретный
Блок Discrete Filter независимо фильтрует каждый канал входного сигнала с помощью заданного цифрового БИХ. Можно задать структуру фильтра следующим Direct form I, Direct form I transposed, Direct form II, или Direct form II transposed. Блок реализует статические фильтры с фиксированными коэффициентами. Можно настроить коэффициенты этих статических фильтров.
Этот блок фильтрует каждый канал входного сигнала независимо с течением времени. Параметр Input processing позволяет вам задать, как блок обрабатывает каждый элемент входа. Можно задать обработку входных элементов как независимого канала (обработка на основе выборки) или обработку каждого столбца входа как независимого канала (обработка на основе кадра). Для выполнения обработки на основе фрейма необходимо иметь лицензию DSP System Toolbox™.
Размерности выхода равны входу размерам, кроме тех случаев, когда вы задаете матрицу отводов фильтра для параметра Numerator coefficients. Когда вы делаете это, выходные размерности зависят от количества различных наборов ответвлений фильтра, которые вы задаете.
Используйте параметр Numerator coefficients, чтобы задать коэффициенты дискретного полинома числителя фильтра. Используйте параметр Denominator coefficients, чтобы задать коэффициенты полинома знаменателя функции. Параметр Denominator coefficients должен быть вектором коэффициентов.
Задайте коэффициенты полиномов числителя и знаменателя в возрастающих степенях z-1. Блок Discrete Filter позволяет вам использовать полиномы в z-1 (оператор задержки), чтобы представлять дискретную систему. Инженеры по обработке сигналов обычно используют этот метод. И наоборот, блок Discrete Transfer Fcn позволяет использовать полиномы в z для представления дискретной системы. Инженеры по системам управления обычно используют этот метод. Когда числитель и полиномы знаменателя имеют одинаковую длину, два метода идентичны.
В Dialog parameters и Input port(s) режимах блок инициализирует состояния внутреннего фильтра до нуля по умолчанию, что эквивалентно принятию прошлых входов и выходов равными нулю. Можно опционально использовать параметр Initial states, чтобы задать ненулевые начальные состояния для задержек фильтра.
Чтобы определить количество начальных значений состояния, которые вы должны задать, и как их задать, смотрите следующую таблицу о допустимых начальных состояниях и количестве элементов задержки (состояния фильтра). Параметр Initial states может принимать одну из четырех форм, как описано в следующей таблице.
Допустимые начальные состояния
| Начальное состояние | Примеры | Описание |
|---|---|---|
|
Скаляр |
Каждый элемент задержки для каждого канала установлен в |
Блок инициализирует все элементы задержки в фильтре до скалярного значения. |
|
Вектор |
Для фильтра с двумя элементами задержки: [d1 d2 ] Элементами задержки для всех каналов являются d1 и d2. |
Каждый векторный элемент задает уникальное начальное условие для соответствующего элемента задержки. Блок применяет один и тот же вектор начальных условий к каждому каналу входного сигнала. Длина вектора должна равняться количеству элементов задержки в фильтре (заданное в таблице Number of Delay Elements (Filter States)). |
|
Вектор или матрица | Для трехканального входного сигнала и фильтра с двумя элементами задержки: [<reservedrangesplaceholder5>1<reservedrangesplaceholder4><reservedrangesplaceholder3><reservedrangesplaceholder2><reservedrangesplaceholder1><reservedrangesplaceholder0>] или
|
Каждый вектор или элемент матрицы задает уникальное начальное условие для соответствующего элемента задержки в соответствующем канале:
|
|
Пустая матрица |
|
Пустая матрица, |
Количество элементов задержки (состояний фильтра) на входной канал зависит от структуры фильтра, как показано в следующей таблице.
Количество элементов задержки (состояния фильтра)
| Структура фильтра | Количество элементов задержки на канал |
|---|---|
|
|
|
|
|
|
В следующих таблицах описываются допустимые начальные состояния для различных размеров входа и различного количества каналов в зависимости от того, задаете ли вы параметр Input processing на основе кадра или на основе выборки.
Обработка на основе фрейма
| Вход | Количество каналов | Допустимые начальные состояния (диалоговое окно) | Допустимые начальные состояния (Input port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
Выборка на основе обработки
| Вход | Количество каналов | Допустимые начальные состояния (диалоговое окно) | Допустимые начальные состояния (Input port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
| <reservedrangesplaceholder1> × <reservedrangesplaceholder0> |
|
|
Когда Initial states является скаляром, блок инициализирует все состояния фильтра до того же скалярного значения. Введите 0 чтобы инициализировать все состояния в нуле. Когда Initial states является вектором или матрицей, каждый вектор или элемент матрицы задает уникальное начальное состояние. Это уникальное состояние соответствует элементу задержки в соответствующем канале:
Длина вектора должна равняться количеству элементов задержки в фильтре, M = max(number of zeros, number of poles).
Матрица должна иметь одинаковое число строк как количество элементов задержки в фильтре, M = max(number of zeros, number of poles). Матрица должна также иметь по одному столбцу для каждого канала входного сигнала.
Пример «Задайте вектор начальных условий для блока дискретного фильтра» показывает отношение между исходным выходом фильтра и начальным входом и состоянием. Учитывая начальное входное u1, первый выходной y1 связан с начальным состоянием [x1, x2] и начальным входом путем:
Filter structure - Структура фильтраDirect form II (по умолчанию) | Direct form I transposed | Direct form I | Direct form II transposedЗадайте дискретную структуру БИХ.
Чтобы использовать любую структуру фильтра кроме Direct form IIнеобходимо иметь доступную лицензию DSP System Toolbox.
Параметры блоков:
FilterStructure |
| Тип: Вектор символов |
Значения:
'Direct form II' | 'Direct form I transposed' | 'Direct form I' | 'Direct form II transposed' |
По умолчанию:
'Direct form II'
|
Numerator Source - Источник коэффициентов числителяDialog (по умолчанию) | Input portУкажите источник коэффициентов числителя следующим Dialog или Input port.
Параметры блоков:
NumeratorSource |
| Тип: Вектор символов |
Значения:
'Dialog' | 'Input port' |
По умолчанию:
'Dialog'
|
Numerator Value - Коэффициенты числителя[1] (по умолчанию) | скалярный вектор | | матрицаЗадайте коэффициенты числителя дискретного фильтра как нисходящие степени z. Используйте вектор-строку, чтобы задать коэффициенты для одного полинома числителя.
Чтобы включить этот параметр, установите Numerator Source равным Dialog.
Параметры блоков:
Numerator |
| Тип: Вектор символов |
| Значения: скаляр | вектор | матрица |
По умолчанию:
'[1]'
|
Denominator Source - Источник коэффициентов знаменателяDialog (по умолчанию) | Input portУкажите источник коэффициентов знаменателя следующим Dialog или Input port.
Параметры блоков:
DenominatorSource |
| Тип: Вектор символов |
Значения:
'Dialog' | 'Input port' |
По умолчанию:
'Dialog'
|
Denominator Value - Коэффициенты знаменателя[1 0.5] (по умолчанию) | векторЗадайте коэффициенты знаменателя дискретного фильтра как нисходящие степени z. Используйте вектор-строку, чтобы задать коэффициенты для одного полинома знаменателя.
Чтобы включить этот параметр, установите Denominator Source равным Dialog.
Параметры блоков:
Denominator |
| Тип: Вектор символов |
| Значения: скаляр | вектор |
По умолчанию:
'[1 0.5]'
|
Initial states Source - Источник начальных состоянийDialog (по умолчанию) | Input portУкажите источник начальных состояний следующим Dialog или Input port.
Параметры блоков:
InitialStatesSource |
| Тип: Вектор символов |
Значения:
'Dialog' | 'Input port' |
По умолчанию:
'Dialog'
|
Initial states Value - Начальные состояния фильтра0 (по умолчанию) | скалярный вектор | | матрицаЗадайте начальные состояния фильтра в виде скаляра, вектора или матрицы. Чтобы узнать, как задать начальные состояния, смотрите Определение начальных состояний.
Чтобы включить этот параметр, установите Filter structure равным Direct form II или Direct form II transposed, и установите Initial states Source равным Dialog.
Параметры блоков:
InitialStates |
| Тип: Вектор символов |
| Значения: скаляр | вектор | матрица |
По умолчанию:
'0'
|
Initial states on numerator side - Начальные состояния числителя0 (по умолчанию) | скалярный вектор | | матрицаЗадайте начальные состояния фильтра числителя как скаляр, вектор или матрица. Чтобы узнать, как задать начальные состояния, смотрите Определение начальных состояний.
Чтобы включить этот порт, установите Filter structure равным Direct form I или Direct form I transposed.
Параметры блоков:
InitialStates |
| Тип: Вектор символов |
| Значения: скаляр | вектор | матрица |
По умолчанию:
'0'
|
Initial states on denominator side - Начальные состояния знаменателя0 (по умолчанию) | скалярный вектор | | матрицаЗадайте начальные состояния фильтра знаменателя в виде скаляра, вектора или матрицы. Чтобы узнать, как задать начальные состояния, смотрите Определение начальных состояний.
Чтобы включить этот порт, установите Filter structure равным Direct form I или Direct form I transposed.
Параметры блоков:
InitialDenominatorStates |
| Тип: Вектор символов |
| Значения: скаляр | вектор | матрица |
По умолчанию:
'0'
|
External reset - Сброс внешнего состоянияNone (по умолчанию) | Rising | Falling | Either | Level | Level holdЗадайте событие триггера, которое будет использоваться для сброса состояний к начальным условиям.
| Режим сброса | Поведение |
|---|---|
None | Нет сброса |
Rising | Сброс на приподнятом ребре |
Falling | Сброс на падающем ребре |
Either | Сброс на восходящем или падающем ребре |
Level | Сброс в любом из следующих случаев:
|
Level hold | Сброс, когда сигнал сброса ненулевой на текущем временном шаге |
Параметры блоков: ExternalReset |
| Тип: Вектор символов |
Значения: 'None' | 'Rising' | 'Falling' | 'Either' | 'Level' | 'Level hold' |
По умолчанию: 'None' |
Input processing - Обработка на основе выборок или фреймовElements as channels (sample based) (по умолчанию) | Columns as channels (frame based)Укажите, выполняет ли блок обработку на основе выборок или фреймов.
Elements as channels (sample based) - Обработайте каждый элемент входа как независимый канал.
Columns as channels (frame based) - Обработайте каждый столбец входа как отдельный канал.
Для обработки на основе фрейма требуется лицензия DSP System Toolbox.
Для получения дополнительной информации смотрите Концепции на основе выборок и фреймов (DSP System Toolbox).
Параметры блоков:
InputProcessing |
| Тип: Вектор символов |
Значения:
'Columns as channels (frame based)' | 'Elements as channels (sample based)' |
По умолчанию:
'Elements as channels (sample based)' |
Optimize by skipping divide by leading denominator coefficient (a0) - Пропустить разделение на a0off (по умолчанию) | onВыберите, когда начальный коэффициент знаменателя, a0, равен единице. Этот параметр оптимизирует ваш код.
Когда вы устанавливаете этот флажок, блок не выполняет разделение- a0 ни в симуляции, ни в сгенерированном коде. Ошибка возникает, если a0 не равен единице.
Когда вы снимаете этот флажок, блок полностью настраивается во время симуляции. Он выполняет разделение- a0 как в симуляции, так и в генерации кода.
Параметры блоков:
a0EqualsOne
|
| Тип: Вектор символов |
Значения:
'off' | 'on' |
По умолчанию:
'off'
|
Sample time (-1 for inherited) - Интервал между выборками-1 (по умолчанию) | скалярный вектор |Задайте временной интервал между выборками. Чтобы наследовать шаг расчета, установите этот параметр равным -1. Для получения дополнительной информации см. Раздел «Задание шага расчета».
Параметры блоков:
SampleTime |
| Тип: Вектор символов |
| Значения: скаляр | вектор |
По умолчанию:
'-1' |
State - Тип данных о состоянииInherit: Same as input (по умолчанию) | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Укажите тип данных о состоянии. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Same as input
Встроенное целое число, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
StateDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Same as input' |
Numerator coefficients - Тип данных коэффициента числителяInherit: Inherit via internal rule (по умолчанию) | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>Задайте тип данных коэффициента числителя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенное целое число со знаком, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
NumCoeffDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via internal rule' |
Numerator coefficient minimum - Минимальное значение коэффициентов числителя[] (по умолчанию) | скаляромЗадайте минимальное значение, которое может иметь коэффициент числителя. Значение по умолчанию [] (не определено). Simulink® программное обеспечение использует это значение для выполнения:
Проверка области значений параметров (см. «Задание минимальных и максимальных значений для параметров блоков»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
NumCoeffMin |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Numerator coefficient maximum - Максимальное значение коэффициентов числителя[] (по умолчанию) | скаляромЗадайте максимальное значение, которое может иметь коэффициент числителя. Значение по умолчанию [] (не определено). Программное обеспечение Simulink использует это значение для выполнения:
Проверка области значений параметров (см. «Задание минимальных и максимальных значений для параметров блоков»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
NumCoeffMax |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Numerator product output - тип выходных данных продукта числителяInherit: Inherit via internal rule (по умолчанию) | Inherit: Same as input | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Задайте тип выходных данных продукта для коэффициентов числителя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
NumProductDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via interal rule' |
Numerator accumulator - Тип данных аккумулятора числителяInherit: Inherit via internal rule (по умолчанию) | Inherit: Same as input | Inherit: Same as product output | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Задайте тип данных аккумулятора для коэффициентов числителя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
NumAccumDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'Inherit: Same as product output' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via interal rule' |
Denominator coefficients - Тип данных коэффициента знаменателяInherit: Inherit via internal rule (по умолчанию) | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>Задайте тип данных коэффициента знаменателя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенное целое число, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
DenCoeffDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via internal rule' |
Denominator coefficient minimum - Минимальное значение коэффициентов знаменателя[] (по умолчанию) | скаляромЗадайте минимальное значение, которое может иметь коэффициент знаменателя. Значение по умолчанию [] (не определено). Программное обеспечение Simulink использует это значение для выполнения:
Проверка области значений параметров (см. «Задание минимальных и максимальных значений для параметров блоков»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
DenCoeffMin |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Denominator coefficient maximum - Максимальное значение коэффициентов знаменателя[] (по умолчанию) | скаляромЗадайте максимальное значение, которое может иметь коэффициент знаменателя. Значение по умолчанию [] (не определено). Программное обеспечение Simulink использует это значение для выполнения:
Проверка области значений параметров (см. «Задание минимальных и максимальных значений для параметров блоков»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
DenCoeffMax |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Denominator product output - тип выходных данных продукта знаменателяInherit: Inherit via internal rule (по умолчанию) | Inherit: Same as input | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Задайте тип выходных данных продукта для коэффициентов знаменателя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
DenProductDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via internal rule' |
Denominator accumulator - Тип данных аккумулятора знаменателяInherit: Inherit via internal rule (по умолчанию) | Inherit: Same as input | Inherit: Same as product output | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Задайте тип данных аккумулятора для коэффициентов знаменателя. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
DenAccumDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'Inherit: Same as product output' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via internal rule' |
Output - Тип выходных данныхInherit: Inherit via internal rule (по умолчанию) | int8 | int16 | int32 | int64 | fixdt(1,16) | fixdt(1,16,0) | <data type expression>Задайте тип выходных данных. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Inherit via internal rule
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Параметры блоков:
OutDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Inherit via internal rule' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Inherit via internal rule' |
Output minimum - Минимальное значение выхода[] (по умолчанию) | скаляромЗадайте минимальное значение, которое может вывести блок. Значение по умолчанию [] (не определено). Программное обеспечение Simulink использует это значение для выполнения:
Проверка области значений симуляции (см. «Задание диапазонов сигнала»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
OutMin |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Output maximum - Максимальное значение выхода[] (по умолчанию) | скаляромЗадайте максимальное значение, которое может вывести блок. Значение по умолчанию [] (не определено). Программное обеспечение Simulink использует это значение для выполнения:
Проверка области значений симуляции (см. «Задание диапазонов сигнала»)
Автоматическое масштабирование типов данных с фиксированной точкой
Параметры блоков:
OutMax |
| Тип: Вектор символов |
| Значения: скаляр |
По умолчанию:
'[]' |
Multiplicand data type - Тип данных MultiplicandInherit: Same as input (по умолчанию) | int8 | int16 | int32 | int64 | fixdt(1,16,0) | <data type expression>Задайте тип данных multiplicand. Можно задать этот параметр как:
Правило, которое наследует тип данных, например Inherit: Same as input
Встроенный тип данных, например int8
Объект типа данных, например, Simulink.NumericType объект
Выражение, которое вычисляется как тип данных, например fixdt(1,16,0)
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
, чтобы отобразить Data Type Assistant, которая помогает вам задать атрибуты type данных. Для получения дополнительной информации смотрите Задать типы данных Используя Data Type Assistant.
Чтобы включить этот параметр, установите Filter structure равным Direct form I transposed
Параметры блоков:
MultiplicandDataTypeStr |
| Тип: Вектор символов |
Значения:
'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
По умолчанию:
'Inherit: Same as input' |
Lock data type settings against changes by the fixed-point tools - Предотвратить переопределение типов данных инструментами с фиксированной точкойoff (по умолчанию) | onВыберите, чтобы заблокировать настройки типа данных этого блока от изменений с помощью Fixed-Point Tool и Fixed-Point Advisor. Для получения дополнительной информации смотрите Блокировка настройки типа выходных данных (Fixed-Point Designer).
Параметры блоков:
LockScale |
Значения:
'off' | 'on' |
По умолчанию:
'off' |
Integer rounding mode - Режим округления для операций с фиксированной точкойFloor (по умолчанию) | Ceiling | Convergent | Nearest | Round | Simplest | ZeroЗадайте режим округления для операций с фиксированной точкой. Для получения дополнительной информации см. раздел Округление (Fixed-Point Designer).
Параметры блоков:
RndMeth |
| Тип: Вектор символов |
Значения:
'Ceiling' | 'Convergent' | 'Floor' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
По умолчанию:
'Floor' |
Saturate on integer overflow - Метод действия переполненияoff (по умолчанию) | onУкажите, будут ли переполнения насыщаться или переноситься.
| Действие | Объяснение | Влияние на переливы | Пример |
|---|---|---|---|
|
Установите этот флажок ( |
Ваша модель имеет возможное переполнение, и вы хотите явную защиту от насыщения в сгенерированном коде. |
Переполнения достигает минимального или максимального значения, которое может представлять тип данных. |
Максимальное значение, которое |
|
Не устанавливайте этот флажок ( |
Вы хотите оптимизировать эффективность вашего сгенерированного кода. Вы хотите избежать переопределения того, как блок обрабатывает сигналы вне области допустимого. Для получения дополнительной информации смотрите Поиск и устранение ошибок диапазона сигнала. |
Переполнения переходят к соответствующему значению, которое представимо типом данных. |
Максимальное значение, которое |
Когда вы устанавливаете этот флажок, насыщение применяется к каждой внутренней операции на блоке, а не только к выходу или результату. Обычно процесс генерации кода может обнаружить, когда переполнение невозможно. В этом случае генератор кода не производит код насыщения.
Параметры блоков: SaturateOnIntegerOverflow |
| Тип: Вектор символов |
Значения:
'off' | 'on' |
По умолчанию: 'off' |
State name - Присвоение уникального имени каждому состоянию' ' (по умолчанию) | 'position' | {'a', 'b', 'c'} | a | ...Присвойте уникальное имя каждому состоянию. Если это поле пусто (' '), присвоение имен не происходит.
Чтобы назначить имя одному состоянию, введите имя между кавычками, например 'position'.
Чтобы назначить имена нескольким состояниям, введите список с разделителем запятыми, окруженный скобками, например {'a', 'b', 'c'}. Каждое имя должно быть уникальным.
Назначение имен состояний с переменной в MATLAB® рабочая область, введите переменную без кавычек. Переменная может быть вектором символов, массивом ячеек или структурой.
Имена состояний применяются только к выбранному блоку.
Количество состояний должно разделяться равномерно между количеством имен состояний.
Можно задать меньше имен, чем состояний, но нельзя задать больше имен, чем состояний.
Для примера можно задать два имени в системе с четырьмя состояниями. Первое имя относится к первым двум состояниям, а второе - к последним двум состояниям.
Чтобы включить этот параметр, установите Filter structure равным Direct form II.
Параметры блоков:
StateName |
| Тип: Вектор символов |
Значения:
' ' | пользовательские |
По умолчанию:
' ' |
State name must resolve to Simulink signal object - Требуется разрешение имен состояний для объекта сигналаoff (по умолчанию) | onУстановите этот флажок, чтобы потребовать, чтобы имя состояния разрешилось к объекту сигнала Simulink.
Чтобы включить этот параметр, установите Filter structure равным Direct form II и задайте значение для State name. Этот параметр появляется только, если вы задаете значение параметра конфигурации модели Signal resolution отличное от None.
Установка этого флажка отключает Code generation storage class.
Параметры блоков:
StateMustResolveToSignalObject |
| Тип: Вектор символов |
Значения:
'off' | 'on' |
По умолчанию:
'off' |
Signal object class - Класс объекта сигналаSimulink.Signal (по умолчанию) | объект класса, который получают из Simulink.SignalЗадайте класс объекта сигнала.
Чтобы включить этот параметр, установите Filter structure равным Direct form II и задайте значение для State name.
Параметры блоков:
StateSignalObject |
| Тип: Вектор символов |
Значения: объект класса, который получают из Simulink.Signal |
По умолчанию:
'Simulink.Signal' |
Code generation storage class - класс памяти состояний для генерации кодаAuto (по умолчанию) | Model default | ExportedGlobal | ImportedExtern | ImportedExternPointer | BitField (Custom) | Volatile (Custom) | ExportToFile (Custom) | ImportFromFile (Custom) | FileScope (Custom) | Localizable (Custom) | Struct (Custom) | GetSet (Custom) | Reusable (Custom)Выберите класс памяти состояний для генерации кода.
Auto - соответствующий класс памяти для состояний, которые не должны взаимодействовать с внешним кодом.
StorageClass
Используйте Signal object class, чтобы выбрать пользовательские классы памяти из пакета, отличного от Simulink.
Чтобы включить этот параметр, установите Filter structure равным Direct form II, и задайте значение для State name.
Параметры блоков:
StateStorageClass |
| Тип: Вектор символов |
Значения: 'Auto' | 'Model default' | 'ExportedGlobal' | 'ImportedExtern' | 'ImportedExternPointer' | 'Custom' | ... |
По умолчанию:
'Auto' |
Code generation storage type qualifier - Квалификатор типа склада'' (по умолчанию)Укажите классификатор типа хранилища, например const или volatile.
Примечание
TypeQualifier будет удалено в следующем релизе. Чтобы применить проверку типа хранилища к данным, используйте пользовательские классы памяти и разделы памяти. Если вы не используете цель генерации кода на основе ERT с Embedded Coder®пользовательские классы памяти и разделы памяти не влияют на сгенерированный код.
Во время симуляции блок использует следующие значения:
Начальное значение объекта сигнала, которому разрешено имя состояния
Значения Min и Max объекта сигнала
Для получения дополнительной информации см. раздел Объекты данных.
Чтобы включить этот параметр, установите Filter structure равным Direct form II. Этот параметр скрыт, если вы ранее не установили его значение.
Параметры блоков:
RTWStateStorageTypeQualifier |
| Тип: Вектор символов |
Значения:
'' | 'const' | 'volatile' | ... |
По умолчанию:
'' |
Этот блок поддерживает только подписанные типы данных с фиксированной точкой.
Блок Дискретный Фильтр принимает и выходы реальные и сложные сигналы любого подписанного типа числовых данных, который поддерживает Simulink. Блок поддерживает те же типы для коэффициентов числителя и знаменателя.
Коэффициенты числителя и знаменателя должны иметь одинаковую сложность. Они могут иметь различные размеры слова и длины дробей.
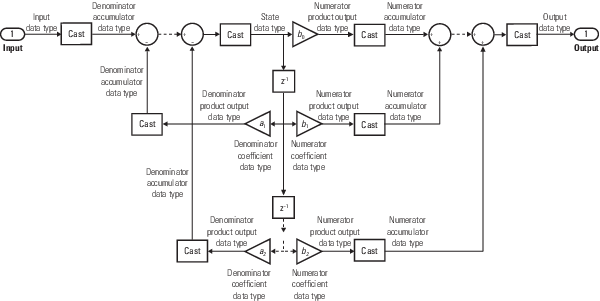
Следующие схемы показывают структуру фильтра и типы данных, используемые в блоке Discrete Filter для сигналов с фиксированной точкой.
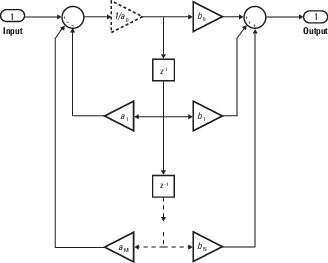
Блок опускает штриховое разделение, когда вы выбираете параметр Optimize by skipping divide by leading denominator coefficient (a0).
Discrete FIR Filter | Allpole Filter (DSP System Toolbox) | Digital Filter Design (DSP System Toolbox) | dsp.AllpoleFilter (DSP System Toolbox) | dsp.IIRFilter (DSP System Toolbox) | Filter Realization Wizard (DSP System Toolbox) | filterDesigner (DSP System Toolbox) | fvtool(Набор Signal Processing Toolbox)



