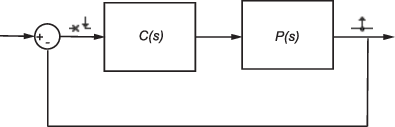
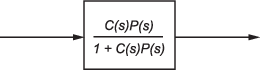
Разомкнутый контур управления является комбинированной характеристикой объекта управления и контроллера, исключая эффект цикла обратной связи. Для примера следующий блок схема показывает систему управления с одним контуром.
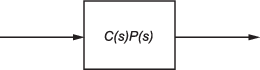
Если контроллер C (s) и объект P (s) линейны, то соответствующая передаточная функция без разомкнутого контура является C (s) P (s).
Чтобы удалить эффекты цикла обратной связи, вставьте точку анализа открытия цикла, не нарушая вручную сигнальную линию. Вручную удаление сигнала обратной связи из нелинейной модели изменяет рабочую точку модели и создает другую линейную модель. Для получения дополнительной информации см. раздел «Как программное обеспечение обрабатывает открытия циклов».
Если вы не вставляете открытие цикла, полученная линейная модель включает эффекты цикла обратной связи.
Чтобы задать открытие цикла для этого примера, можно использовать одну из следующих точек анализа.
| Точка анализа | Описание | Вычислить C (s) P (s) |
|---|---|---|
| Задает открытие цикла с последующим входом возмущением. | Задайте вход разомкнутого контура на входе в контроллер и выходное измерение на выходе объекта управления.
| |
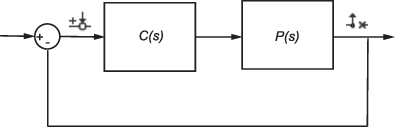
| Задает измерение выхода, за которым следует пропуск цикла. | Задайте выход разомкнутого контура на выходе объекта управления и входное возмущение на входе контроллера.
|
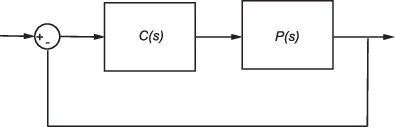
Для некоторых систем вы не можете задать открытие цикла в том же месте, что и входная или выходная точка линеаризации. Например, чтобы открыть внешний контур в следующей системе, точка открытия цикла добавляется к пути обратной связи с помощью точки анализа пропуска цикла. ![]() В результате только синие блоки находятся на пути линеаризации.
В результате только синие блоки находятся на пути линеаризации.
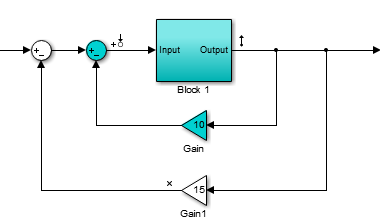
Размещение открытия цикла в том же месте, что и сигнала входа или выхода, также удаляет эффект внутреннего цикла из результата линеаризации.
Можно задать точки анализа непосредственно в Simulink® модель, в Model Linearizer или в командной строке. Для получения дополнительной информации о различных типах точек анализа и о том, как их задать, см. «Задание фрагмента модели для линеаризации».
Этот пример показывает, как вычислить линейную модель объединенной системы контроллер-объект без эффектов сигнала обратной связи. Можно проанализировать получившуюся линейную модель, используя, например, диаграмму Боде.
Откройте модель Simulink.
sys = 'watertank';
open_system(sys)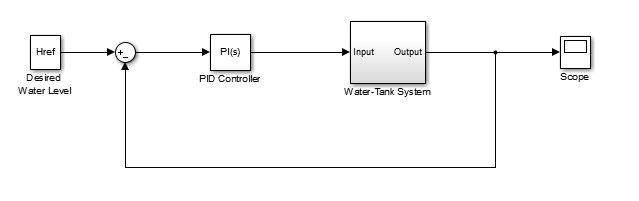
Блок Water-Tank System представляет объект в этой системе управления и содержит все нелинейности системы.
В окне модели Simulink задайте фрагмент модели, которая будет линеаризироваться. В данном примере задайте открытие цикла с помощью выходной точки анализа без разомкнутого контура.
Откройте вкладку «Линеаризация». Для этого в галерее Apps щелкните Диспетчер линеаризации.
Чтобы задать точку анализа для сигнала, щелкните сигнал в модели. Затем на вкладке Linearization в галерее Insert Analysis Points выберите тип точки анализа.
Сконфигурируйте входной сигнал блока PID Controller как Input Perturbation.
Сконфигурируйте выходной сигнал блока Water-Tank System как Open-loop Output.
В модели появляются аннотации, указывающие, какие сигналы обозначаются как точки анализа.
Совет
Если вы не хотите вносить изменения в модель Simulink, можно задать точки анализа в Model Linearizer. Для получения дополнительной информации смотрите Фрагмент модели для линеаризации в Model Linearizer.
Откройте Model Linearizer для модели. В окне модели Simulink, в галерее Apps, нажмите Model Linearizer.
По умолчанию точки анализа, заданные в модели, выбираются для линеаризации, как показано в раскрывающемся списке Analysis I/Os.

Чтобы линеаризировать модель с помощью заданных точек анализа и сгенерировать диаграмму Боде линеаризированной модели, нажмите![]() Bode.
Bode.
По умолчанию Model Linearizer линеаризирует модель в начальных условиях модели, как показано в выпадающем списке Operating Point. Для примеров линеаризации модели в другой рабочей точке смотрите Linearize at Trimmed Operating Point и Linearize at Simulation Snapshot.
Совет
Чтобы сгенерировать типы отклика, отличные от Диаграммы Боде, нажмите соответствующую кнопку в галерее графика.
Чтобы просмотреть минимальные запасы устойчивости для модели, щелкните правой кнопкой мыши Диаграмма Боде и выберите Characteristics > Minimum Stability Margins.
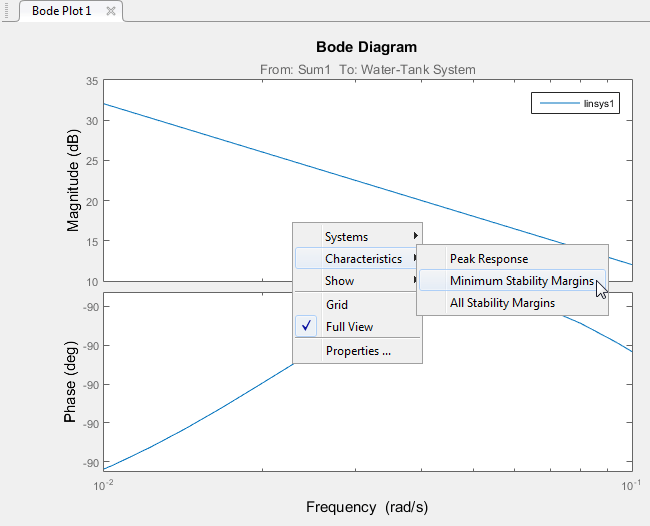
На диаграмме Боде отображается маркер запаса по фазе. Чтобы показать всплывающую подсказку, содержащую значение запаса по фазе, щелкните маркер.
Для этой системы запас по фазе составляет 90 степени при частоте среза 0,4 рад/с.
Этот пример показывает, как вычислить линейную модель объединенной системы контроллер-объект без эффектов сигнала обратной связи. Можно проанализировать получившуюся линейную модель, используя, например, диаграмму Боде.
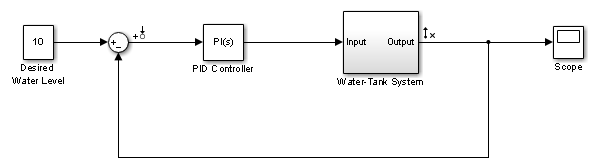
Откройте модель Simulink.
sys = 'watertank';
open_system(sys)

Укажите фрагмент модели для линеаризации путем создания массива точек анализа с помощью linio команда:
Разомкнутая входная точка на входе блока ПИД-регулятор. Этот сигнал генерируется на выходе блока Sum1.
Выходное измерение на выходе блока Water-Tank System.
io(1) = linio('watertank/Sum1',1,'openinput'); io(2) = linio('watertank/Water-Tank System',1,'output');
Входная точка анализа разомкнутого контура включает открытие цикла, которое ломает поток сигналов и удаляет эффекты цикла обратной связи.
Линеаризируйте модель в рабочей точке модели по умолчанию с помощью linearize команда.
linsys = linearize(sys,io);
linsys - линейная передаточная функция разомкнутого контура системы. Теперь можно анализировать реакцию, для примера, путем построения графика ее частотной характеристики и просмотра усиления и запасов по фазе.
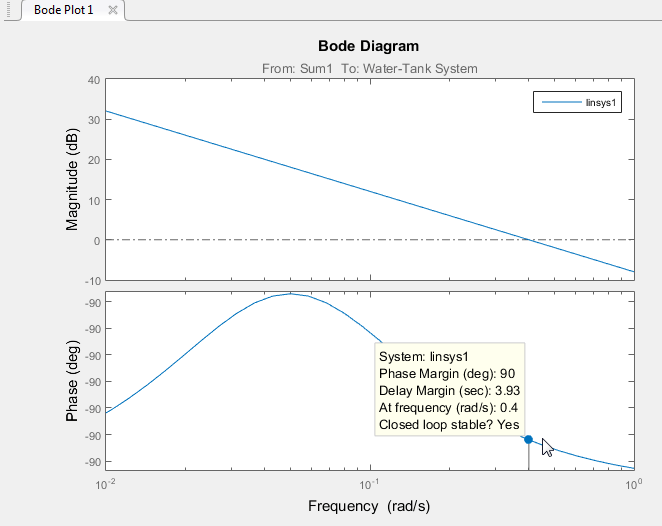
margin(linsys)

Для этой системы запас по амплитуде бесконечен, а запас по фазе составляет 90 степени при частоте среза 0,4 рад/с.