Комбинированное скольжение 2DOF колесом с диском, барабаном или картографическим тормозом
Динамика автомобиля Blockset/Колеса и шины
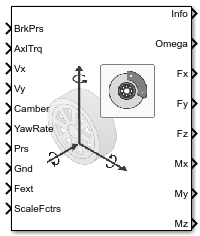
Блок Combined Slip Wheel 2DOF реализует продольное и боковое поведение колеса, характеризующегося Магической формулой[1] and [2]. Можно импортировать собственные данные о шинах или использовать установленные наборы данных о шинах, предоставленные Глобальным центром симуляции эффективности автомобиля (GCAPS). Используйте блок в симуляциях привода и транспортного средства, где требуется низкочастотная шина-дорога и тормозные силы, чтобы определить транспортное средство ускорение, торможение и сопротивление качению колеса. Блок подходит для приложений, которые требуют комбинированного бокового скольжения, например, в исследованиях бокового движения и устойчивости рыскания.
На основе крутящего момента на приводе, давления тормоза, высоты дороги, угла развала колеса и давления надувания, блок определяет скорость вращения колеса, вертикальное движение, силы и моменты во всех шести степенях свободы (DOF). Используйте вертикальный СТЕПЕНЬ СВОБОДЫ, чтобы изучить резонансы подвески шин от профилей дорог или движения шасси.
Используйте параметр Tire type, чтобы выбрать источник данных о шинах.
| Цель | Действие |
|---|---|
Реализуйте Магическую формулу с помощью эмпирических уравнений[1] and [2]. В уравнениях используются аппроксимационные коэффициенты, которые соответствуют параметрам блоков. | Обновите параметры блоков с помощью коэффициентов аппроксимации из файла:
|
Реализуйте установленные наборы данных о шинах, предоставленные Глобальным центром симуляции эффективности автомобиля (GCAPS). | Обновите применимые параметры блоков с помощью GCAPS установленной шины данных:
|
Используйте параметр Brake Type, чтобы выбрать тормоз.
| Цель | Настройка типа тормоза |
|---|---|
Нет торможения |
|
Реализуйте тормоз, который преобразует давление в тормозном цилиндре в тормозную силу |
|
Реализуйте симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной крутящий момент |
|
Реализуйте интерполяционную таблицу, которая является функцией скорости и прикладываемого тормозного давления колеса |
|
Блок вычисляет инерционную характеристику колеса, удовлетворяющего:
Потери на оси
Тормозной и приводной крутящий момент
Сопротивление качению шин
Контакт заземления через интерфейс шина-дорога
Чтобы реализовать Магическую формулу, блок использует эти уравнения.
| Вычисление | Уравнения |
|---|---|
Продольная сила | Динамика аппарата[2] уравнения с 4.E9 по 4.E57 |
Боковая сила - чистая боковая кромка | Динамика аппарата[2] уравнения с 4.E19 по 4.E30 |
Боковая сила - комбинированное скольжение | Динамика аппарата[2] уравнения с 4.E58 по 4.E67 |
Вертикальная динамика | Динамика аппарата[2] уравнения 4.E68, 4.E1, 4.E2a и 4.E2b |
Опрокидывающая пара | Динамика аппарата[2] уравнение 4.E69 |
Сопротивление качению |
|
Выравнивающий момент | Динамика аппарата[2] уравнение 4.E31 по 4.E49 |
Центрирующий крутящий момент - комбинированное скольжение | Динамика аппарата[2] уравнение 4.E71 по 4.E78 |
Входной крутящий момент является суммированием приложенного крутящего момента оси, тормозного момента и момента, возникающего из-за объединенного крутящего момента шины.
На момент, вытекающий из комбинированного крутящего момента шины, блок реализует силы тягового колеса и сопротивление качению с динамикой первого порядка. Сопротивление качению имеет постоянную по времени, параметризованную с точки зрения длины релаксации.
Если тормоза включены, блок определяет условие блокировки или разблокировки торможения на основе идеализированной модели трения сухой муфты. На основе условия блокировки блок реализует эти модели трения и динамики.
| Если | Условие блокировки | Модель трения | Динамическая модель |
|---|---|---|---|
Незапертый | |||
Запертый |
В уравнениях используются эти переменные.
| ω | Скорость вращения колеса |
| a | Независимая от скорости сила компонента |
| b | Компонент линейной силы скорости |
| c | Квадратичная сила скорости компонента |
| Le | Длина релаксации шин |
| J | Момент инерции |
| My | Крутящий момент сопротивления качению |
| Ta | Приложенный крутящий момент оси вокруг оси вращения колеса |
| Tb | Тормозной крутящий момент |
| Td | Комбинированный крутящий момент в шинах |
| Tf | Фрикционный крутящий момент |
| Ti | Крутящий момент входа сети |
| Tk | Кинетический фрикционный крутящий момент |
| To | Крутящий момент выхода сети |
| Ts | Статический крутящий момент трения |
| Fc | Приложенная сила сцепления |
| Fx | Продольная сила, развиваемая интерфейсом дороги шины из-за скольжения |
| Reff | Эффективный радиус сцепления |
| Ro | Внешний радиус кольцевого диска |
| Ri | Внутренний радиус кольцевого диска |
| Re | Эффективный радиус шины при нагрузке и при заданном давлении |
| Vx | Скорость продольной оси |
| Fz | Нормальная сила транспортного средства |
| ɑ | Экспонента давления в шинах |
| β | Нормальная экспонента силы |
| pi | Давление в шинах |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
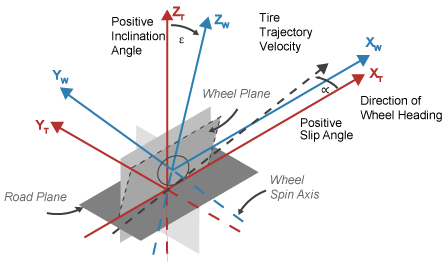
Чтобы разрешить силы и моменты, блок использует ориентацию Z-Up для систем координат шины и колеса.
Оси систем координат шин (XT, YT, ZT) фиксируются в опорной системе координат, присоединенной к шине. Источник находится в контакте шины с землей.
Оси системы координат колеса (XW, YW, ZW) фиксируются в опорной раме, прикрепленной к колесу. Источник находится в центре колеса.
Ориентация по оси Z[1]
Если вы задаете параметр Brake Type Discблок реализует дисковый тормоз. Этот рисунок показывает вид сбоку и спереди дискового тормоза.
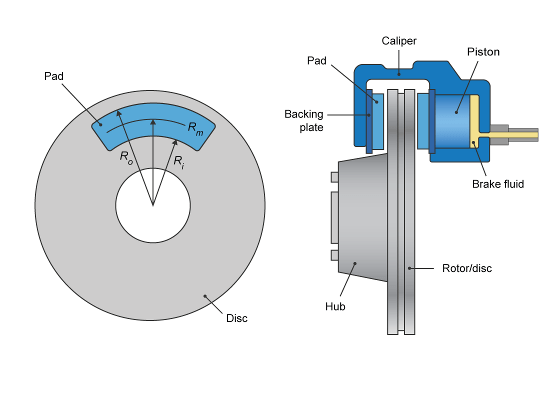
Дисковый тормоз преобразует давление в тормозном цилиндре из тормозного цилиндра в усилие. Дисковый тормоз прикладывает силу к среднему радиусу тормозной колодки.
Блок использует эти уравнения, чтобы вычислить момент привода для дискового тормоза.
В уравнениях используются эти переменные.
| T | Момент привода |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в узле дискового тормоза |
| μstatic | Коэффициент статического трения пары диск-колодка |
| μ | Коэффициент кинетического трения пары диск-колодка |
| Ba | Внутренний диаметр тормозного цилиндра суппорта |
| Rm | Средний радиус приложения силы тормозной колодки на роторе тормоза |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
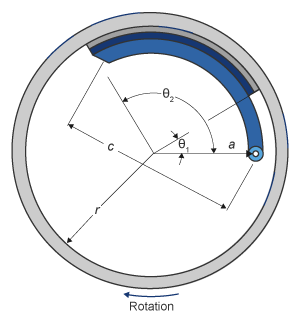
Если вы задаете параметр Brake Type Drum, блок реализует статический (статический) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двустороннего гидравлического привода и двух тормозных колодок. Тормозные колодки не имеют общего шарнирного контакта.
Модель симплексного барабанного тормоза использует приложенную силу и геометрию тормоза, чтобы вычислить крутящий момент привода для каждой тормозной колодки. Модель барабана принимает, что приводы и геометрия башмака симметричны для обеих сторон, позволяя использовать один набор геометрии и параметров трения для обеих башмаков.
Блок реализует уравнения, которые получают из этих уравнений в Основах Элементов Машины.
В уравнениях используются эти переменные.
| T | Момент привода |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент статического трения пары диск-колодка |
| μ | Коэффициент кинетического трения пары диск-колодка |
| Trshoe | Момент привода правой колодки |
| Tlshoe | Момент привода левой колодки |
| a | Расстояние от центра барабана до шарнира контакта центра башмака |
| c | Расстояние от шарнира контакта центра колодки до соединения привода тормоза на колодке тормоза |
| r | Внутренний радиус барабана |
| Ba | Внутренний диаметр тормозного цилиндра суппорта |
| Θ1 | Угол от шарнира контакта центра колодки до начала материала тормозной колодки на колодке |
| Θ2 | Угол от шарнира контакта центра к концу материала тормозной колодки на колодке |
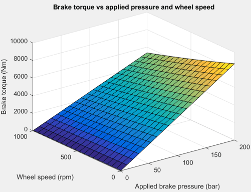
Если вы задаете параметр Brake Type Mappedблок использует интерполяционную таблицу, чтобы определить момент привода.
В уравнениях используются эти переменные.
| T | Момент привода |
Интерполяционная таблица момента привода | |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения интерфейса «поверхность-поверхность барабана» при статических условиях |
| μ | Коэффициент трения интерфейса диск-ротор |
Интерполяционная таблица для крутящего момента привода, , является функцией прикладываемого тормозного давления и скорости вращения колеса, где:
T - момент привода, в Н· м.
P прикладываемого тормозного давления, в баре.
N - скорость колеса, в об/мин.
Tire Type - Выбор типаExternal file (по умолчанию) | Light passenger car 205/60R15 | Mid-size passenger car 235/45R18 | Performance car 225/40R19 | SUV 265/50R20 | Light truck 275/65R18 | Commercial truck 295/75R22.5Используйте параметр Tire type, чтобы выбрать источник данных о шинах.
| Цель | Действие |
|---|---|
Реализуйте Магическую формулу с помощью эмпирических уравнений[1] and [2]. В уравнениях используются аппроксимационные коэффициенты, которые соответствуют параметрам блоков. | Обновите параметры блоков с помощью коэффициентов аппроксимации из файла:
|
Реализуйте установленные наборы данных о шинах, предоставленные Глобальным центром симуляции эффективности автомобиля (GCAPS). | Обновите применимые параметры блоков с помощью GCAPS установленной шины данных:
|
Brake Type - Выбор типаNone | Disc | Drum | MappedИспользуйте параметр Brake Type, чтобы выбрать тормоз.
| Цель | Настройка типа тормоза |
|---|---|
Нет торможения |
|
Реализуйте тормоз, который преобразует давление в тормозном цилиндре в тормозную силу |
|
Реализуйте симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной крутящий момент |
|
Реализуйте интерполяционную таблицу, которая является функцией скорости и прикладываемого тормозного давления колеса |
|
Static friction coefficient, mu_static - Статическое трение.3 (по умолчанию) | scalarСтатический коэффициент трения, без размерности.
Чтобы включить этот параметр, для параметра Brake Type задайте один из следующих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic - Кинетическое трение.2 (по умолчанию) | scalarКинематический коэффициент трения, безразмерный.
Чтобы включить этот параметр, для параметра Brake Type задайте один из следующих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore - Расстояние между отверстиями.05 (по умолчанию) | scalarОтверстие привода дискового тормоза, в м.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Brake pad mean radius, Rm - Радиус.177 (по умолчанию) | scalarСредний радиус тормозной колодки, в м.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Number of brake pads, num_pads - Количество2 (по умолчанию) | scalarКоличество тормозных колодок.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Drum brake actuator bore, disc_abore - Расстояние между отверстиями0.0508 (по умолчанию) | scalarОтверстие привода барабанного тормоза, в м.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to drum center distance, drum_a - Расстояние0.123 (по умолчанию) | scalarБашмак с контакта по центру барабана, в м.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin center to force application point distance, drum_c - Расстояние0.212 (по умолчанию) | scalarКонтакт башмака для усиления расстояния между точками применения, в м.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Drum internal radius, drum_r - Радиус0.15 (по умолчанию) | scalarВнутренний радиус барабана, в м.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad start angle, drum_theta1 - Угол0 (по умолчанию) | scalarБашмак с контакта до начального угла в град.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad end angle, drum_theta2 - Угол126 (по умолчанию) | scalarБашмак, контакт к углу конца колодки, в град.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Brake actuator pressure breakpoints, brake_p_bpt - Точки остановаvectorТочки прерывания давления привода тормоза, в бар.
Чтобы включить отображенные параметры тормоза, выберите Mapped для параметра Brake Type.
Wheel speed breakpoints, brake_n_bpt - Точки остановаvectorТочки останова вращения колеса, в об/мин.
Чтобы включить отображенные параметры тормоза, выберите Mapped для параметра Brake Type.
Brake torque map, f_brake_t - Интерполяционная таблицаarrayИнтерполяционная таблица для крутящего момента привода, , является функцией прикладываемого тормозного давления и скорости вращения колеса, где:
T - момент привода, в Н· м.
P прикладываемого тормозного давления, в баре.
N - скорость колеса, в об/мин.
Чтобы включить отображенные параметры тормоза, выберите Mapped для параметра Brake Type.
Tire file or object, tireParamSet - Файл шиныvdynPassCar.mat (по умолчанию) | .tir | .txtФайл шины .tir или объект, содержащий эмпирические данные для моделирования продольного и бокового поведения шины с помощью Формулы Magic. Если вы предоставляете .txt убедитесь, что файл содержит имена, соответствующие параметрам блоков.
Обновите параметры блоков с помощью коэффициентов аппроксимации из файла:
Установите Tire type значение External file.
На панели Wheel and Tire Parameters > Tire выберите Select file.
Выберите файл коэффициентов шины.
Выберите Update mask values from file. В диалоговом окне с запросом подтверждения нажмите OK. Блок обновляет параметры.
Выберите Apply.
Maximum pressure, PRESMAX - Давление1003118 (по умолчанию) | scalarМаксимальное давление, PRESMAX, в Па.
Minimum pressure, PRESMIN - Давление9982 (по умолчанию) | scalarМинимальное давление, PRESMIN, в Па.
Maximum normal force, FZMAX - Сила10000 (по умолчанию) | scalarМаксимальная нормальная сила, FZMAX, в Н.
Minimum normal force, FZMIN - Сила100 (по умолчанию) | scalarМинимальная нормальная сила, FZMIN, в Н.
Velocity tolerance used to handle low velocity situations, VXLOW - Допуск0.1 (по умолчанию) | scalarДопуск скорости для обработки ситуаций с низкой скоростью, VXLOW, в м/с.
Max allowable slip ratio (absolute), KPUMAX - Коэффициент1.5 (по умолчанию) | scalarМаксимальный допустимый коэффициент скольжения (абсолютный), KPUMAX, безразмерный.
Minimum allowable slip ratio (absolute), KPUMIN - Коэффициент-1.5 (по умолчанию) | scalarМинимальный допустимый коэффициент скольжения (абсолютный), KPUMIN, безразмерный.
Max allowable slip angle (absolute), ALPMAX - Угол1.5708 (по умолчанию) | scalarМакс допустимый угол скольжения (абсолютный), ALPMAX, в рад.
Minimum allowable slip angle (absolute), ALPMIN - Угол-1.5708 (по умолчанию) | scalarМинимальный допустимый угол скольжения (абсолютный), ALPMIN, в рад.
Maximum allowable camber angle, CAMMAX - Угол0.173 (по умолчанию) | scalarМаксимально допустимый угол развала CAMMAX, в рад.
Minimum allowable camber angle, CAMMIN - Угол-0.173 (по умолчанию) | scalarМинимальный допустимый угол развала, CAMMIN, в рад.
Nominal longitudinal speed, LONGVL - Скорость16.7 (по умолчанию) | scalarНоминальная продольная скорость, LONGVL, в м/с.
Initial rotational velocity, omegao - Скорость0 (по умолчанию) | scalarНачальная скорость вращения, в рад/с.
Rotational damping, br - Демпфирование1e-3 (по умолчанию) | scalarВращательное демпфирование, br, в Н· м· с/рад.
Unloaded radius, UNLOADED_RADIUS - Радиус0.309 (по умолчанию) | scalarРадиус разгрузки, UNLOADED_RADIUS, в м.
Nominal pressure, NOMPRES - Давление224006 (по умолчанию) | scalarНоминальное давление, NOMPRES, в Па.
Nominal normal force, FNOMIN - Сила4025 (по умолчанию) | scalarНоминальная нормальная сила, FNOMIN, в Н.
Wheel width, WIDTH - Ширина0.209 (по умолчанию) | scalarШирина колеса, WIDTH, в м.
Rim radius, RIM_RADIUS - Радиус.19 (по умолчанию) | scalarРадиус обода, RIM_RADIUS, в м.
Wheel mass, MASS - Масса9.465 (по умолчанию) | scalarМасса колеса, MASS, в кг.
Rotational inertia (rolling axis), IYY - Инерция0.74 (по умолчанию) | scalarИнерция вращения (ось качения), IYY, в кг· м ^ 2.
Gravity, GRAVITY - Сила тяжести-9.81 (по умолчанию) | scalarСила тяжести, GRAVITY, в м/с ^ 2.
Initial tire displacement, zo - Перемещение0 (по умолчанию) | scalarНачальный ход шины, zo, в м.
Initial wheel vertical velocity (wheel fixed frame), zdoto - Скорость0 (по умолчанию) | scalarНачальная вертикальная скорость колеса (неподвижная система координат колеса), zdoto, в м/с.
Effective rolling radius at low load stiffness, BREFF - Жесткость8.25094594147963 (по умолчанию) | scalarЭффективный радиус качения при низкой жесткости, BREFF, безразмерности.
Effective rolling radius peak value, DREFF - Радиус0.260468730454265 (по умолчанию) | scalarЭффективное значение пика радиуса качения, DREFF, безразмерное.
Effective rolling radius at high load stiffness, FREFF - Радиус0.0735298544471851 (по умолчанию) | scalarЭффективный радиус качения при высокой жесткости нагрузки, FREFF, безразмерный.
Unloaded to nominal rolling radius ratio, Q_RE0 - Коэффициент1.00866439868088 (по умолчанию) | scalarКоэффициент радиуса разгрузки и номинального качения, Q_RE0, безразмерный.
Radius rotational speed dependence, Q_V1 - Скорость0.000760413786224011 (по умолчанию) | scalarЗависимость скорости вращения радиуса, Q_V1, безразмерная.
Stiffness rotational speed dependence, Q_V2 - Скорость0.0463384792019201 (по умолчанию) | scalarЗависимость скорости вращения жесткости, Q_V2, безразмерная.
Linear load change with deflection, Q_FZ1 - Изменение нагрузки0 (по умолчанию) | scalarЛинейное изменение нагрузки с отклонением, Q_FZ1, без размерности.
Quadratic load change with deflection, Q_FZ2 - Изменение нагрузки15.6870832810226 (по умолчанию) | scalarКвадратичное изменение нагрузки с отклонением, Q_FZ2, без размерности.
Linear load change with deflection and quadratic camber, Q_FZ3 - Изменение нагрузки0 (по умолчанию) | scalarЛинейное изменение нагрузки с отклонением и квадратичным развалом, Q_FZ3, без размерности.
Load response to longitudinal force, Q_FCX - Сила0.138643970247602 (по умолчанию) | scalarРеакция нагрузки на продольную силу, Q_FCX, безразмерную.
Load response to lateral force, Q_FCY - Сила0.10843499565426 (по умолчанию) | scalarРеакция нагрузки на боковую силу, Q_FCY, безразмерную.
Vertical stiffness change due to lateral load dependency on lateral stiffness, Q_FCY2 - Жесткость-0.465763352339538 (по умолчанию) | scalarИзменение вертикальной жесткости из-за зависимости боковой нагрузки от боковой жесткости, Q_FCY2, безразмерной.
Stiffness response to pressure, PFZ1 - Жесткость0.69958166705601 (по умолчанию) | scalarРеакция жесткости на давление, PFZ1, безразмерность.
Vertical tire stiffness, VERTICAL_STIFFNESS - Жесткость207885.061134007 (по умолчанию) | scalarВертикальная жесткость шины, VERTICAL_STIFFNESS, в Н/м.
Vertical tire damping, VERTICAL_DAMPING - Демпфирование494.649255786991 (по умолчанию) | scalarДемпфирование шин по вертикали, VERTICAL_DAMPING, в Н· с/м.
Rim bottoming out offset, BOTTOM_OFFST - Смещение.01 (по умолчанию) | scalarСмещение дна обода, BOTTOM_OFFST, в м.
Bottoming out stiffness, BOTTOM_STIFF - Жесткость2e6 (по умолчанию) | scalarНижняя жесткость, BOTTOM_STIFF, в Н/м.
Longitudinal stiffness, LONGITUDINAL_STIFFNESS - Жесткость388714.175879854 (по умолчанию) | scalarПродольная жесткость, LONGITUDINAL_STIFFNESS, в Н/м.
Lateral stiffness, LATERAL_STIFFNESS - Жесткость157087.404633332 (по умолчанию) | scalarПродольная жесткость, LATERAL_STIFFNESS, в Н/м.
Linear vertical deflection influence on longitudinal stiffness, PCFX1 - Влияние отклонения0.18539229191199 (по умолчанию) | scalarВлияние линейного вертикального отклонения на продольную жесткость, PCFX1, безразмерное.
Quadratic vertical deflection influence on longitudinal stiffness, PCFX2 - Влияние отклонения0 (по умолчанию) | scalarКвадратичное влияние вертикального отклонения на продольную жесткость, PCFX2, безразмерное.
Pressure dependency on longitudinal stiffness, PCFX3 - Зависимости от давления0 (по умолчанию) | scalarЗависимость давления от продольной жесткости, PCFX3, безразмерность.
Linear vertical deflection influence on lateral stiffness, PCFY1 - Влияние отклонения0.163183345037677 (по умолчанию) | scalarВлияние линейного вертикального отклонения на боковую жесткость, PCFY1, безразмерность.
Quadratic vertical deflection influence on lateral stiffness, PCFY2 - Влияние отклонения0 (по умолчанию) | scalarКвадратичное влияние вертикального отклонения на боковую жесткость, PCFY2, безразмерность.
Pressure dependency on longitudinal stiffness, PCFY3 - Зависимости от давления0.249094918231954 (по умолчанию) | scalarЗависимость давления от продольной жесткости, PCFY3, безразмерность.
Contact length square root term, Q_RA1 - Срок службы0.675942571700787 (по умолчанию) | scalarДлина контакта квадратный корень термин, Q_RA1, безразмерный.
Contact length linear term, Q_RA2 - Срок службы0.73800463546164 (по умолчанию) | scalarЛинейный термин длины контакта, Q_RA2, безразмерный.
Contact width root term, Q_RB1 - Член ширины1.04487486456705 (по умолчанию) | scalarКорневой термин контактной ширины, Q_RB1, безразмерный.
Contact width linear term, Q_RB2 - Член ширины-1.191763806629 (по умолчанию) | scalarЛинейный термин контактной ширины Q_RB2, без размерности.
Cfx shape factor, PCX1 - Коэффициент формы1.58523057950359 (по умолчанию) | scalarМасштабный фактор, Cfx, PCX1, безразмерный.
Longitudinal friction at nominal normal load, PDX1 - Трение1.0239116238178 (по умолчанию) | scalarПродольное трение при номинальной нормальной нагрузке, PDX1, безразмерное.
Frictional variation with load, PDX2 - Изменение трения-0.0842405110022724 (по умолчанию) | scalarФрикционные изменения с нагрузкой, PDX2, без размерности.
Frictional variation with camber, PDX3 - Изменение трения0 (по умолчанию) | scalarФрикционное изменение с разворотом, PDX3, в 1/рад ^ 2.
Longitudinal curvature at nominal normal load, PEX1 - Кривизна0.110312777158455 (по умолчанию) | scalarПродольная кривизна при номинальной нормальной нагрузке, PEX1, безразмерная.
Variation of curvature factor with load, PEX2 - Изменение кривизны0.313468516038146 (по умолчанию) | scalarИзменение коэффициента кривизны с нагрузкой, PEX2, без размерности.
Variation of curvature factor with square of load, PEX3 - Изменение кривизны0 (по умолчанию) | scalarИзменение коэффициента кривизны с квадратом нагрузки, PEX3, без размерности.
Longitudinal curvature factor with slip, PEX4 - Кривизна0.0016060905760045 (по умолчанию) | scalarКоэффициент продольной кривизны с скольжением, PEX4, без размерности.
Longitudinal slip stiffness at nominal normal load, PKX1 - Жесткость21.3872544684023 (по умолчанию) | scalarПродольная скользящая жесткость при номинальной нормальной нагрузке, PKX1, безразмерная.
Variation of slip stiffness with load, PKX2 - Изменение жесткости14.0006541873175 (по умолчанию) | scalarИзменение жесткости скольжения с нагрузкой, PKX1, без размерности.
Slip stiffness exponent factor, PKX3 - Скользящая жесткость-0.405326109653452 (по умолчанию) | scalarКоэффициент степени скольжения жесткости, PKX3, безразмерный.
Horizontal shift in slip ratio at nominal normal load, PHX1 - Сдвиг коэффициента скольжения0.000212599305364818 (по умолчанию) | scalarГоризонтальный сдвиг в коэффициенте скольжения при номинальной нормальной нагрузке, PHX1, безразмерный.
Variation of horizontal slip ratio with load, PHX2 - Изменение скольжения0.00115950515263055 (по умолчанию) | scalarИзменение коэффициента горизонтального скольжения с нагрузкой, PHX2, без размерности.
Vertical shift in load at nominal normal load, PVX1 - Смена нагрузки1.59236164471432e-05 (по умолчанию) | scalarВертикальный сдвиг нагрузки при номинальной нормальной нагрузке, PVX1, безразмерный.
Variation of vertical shift with load, PVX2 - Изменение нагрузки0.000104321112127671 (по умолчанию) | scalarИзменение вертикального сдвига с нагрузкой, PVX2, без размерности.
Linear variation of longitudinal slip stiffness with tire pressure, PPX1 - Изменение жесткости-0.349461321276586 (по умолчанию) | scalarЛинейное изменение жесткости продольного скольжения при давлении в шине, PPX1, без размеров.
Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 - Изменение жесткости0.387840040616429 (по умолчанию) | scalarКвадратичное изменение жесткости продольного скольжения при давлении в шине, PPX2, без размеров.
Linear variation of peak longitudinal friction with tire pressure, PPX3 - Изменение трения-0.0969947336569324 (по умолчанию) | scalarЛинейное изменение пикового продольного трения с давлением в шине, PPX3, безразмерное.
Quadratic variation of peak longitudinal friction with tire pressure, PPX4 - Изменение трения0.0632271859795801 (по умолчанию) | scalarКвадратичное изменение пикового продольного трения при давлении в шине, PPX4, безразмерном.
Combined slip Fx slope factor reduction, RBX1 - Комбинированное уменьшение коэффициента наклона продольной силы скольжения12.7633329850276 (по умолчанию) | scalarКомбинированная продольная сила скольжения, Fx, уменьшение коэффициента наклона, RBX1, безразмерная.
Slip ratio Fx slope reduction variation, RBX2 - Коэффициент скольжения, изменение наклона продольной силы9.5787123658471 (по умолчанию) | scalarОтношение скольжения продольная сила, Fx, изменение уменьшения уклона, RBX2, безразмерная.
Camber influence on combined slip Fx stiffness, RBX3 - Влияние развала на комбинированную скользящую продольную жесткость силы0 (по умолчанию) | scalarВлияние развала на комбинированную скользящую продольную силу, Fx, жесткость, RBX3, безразмерность.
Shape factor for combined slip Fx reduction, RCX1 - Масштабный фактор для комбинированного снижения продольной силы скольжения1.02796280922059 (по умолчанию) | scalarМасштабный фактор для комбинированной скользящей продольной силы, Fx, восстановления, RCX1, безразмерной.
Combined Fx curvature factor, REX1 - Комбинированный коэффициент кривизны продольной силы-0.45202516851367 (по умолчанию) | scalarКомбинированная продольная сила, Fx, коэффициент кривизны, REX1, безразмерность.
Combined Fx curvature factor with load, REX2 - Комбинированный коэффициент кривизны продольной силы-0.47304886171176 (по умолчанию) | scalarКомбинированная продольная сила, Fx, коэффициент кривизны с нагрузкой, REX2, безразмерность.
Combined slip Fx shift factor reduction, RHX1 - Комбинированный коэффициент скольжения продольной силы скольжения0.000233272373115809 (по умолчанию) | scalarКомбинированная продольная сила скольжения, Fx, уменьшение коэффициента сдвига, RHX1, безразмерность.
Vertical shift of overturning moment, QSX1 - Опрокидывающий момент-0.00788307788961443 (по умолчанию) | scalarВертикальный сдвиг опрокидывающего момента, QSX1, безразмерный.
Overturning moment due to camber, QSX2 - Опрокидывающий момент из-за развала0.954629515459396 (по умолчанию) | scalarОпрокидывающий момент из-за развала, QSX2, безразмерности.
Overturning moment due to Fy, QSX3 - Опрокидывающий момент от боковой силы0.0155855777667025 (по умолчанию) | scalarОпрокидывающий момент от боковой силы, QSX3, безразмерный.
Mx combined lateral force load and camber, QSX4 - Опрокидывающий момент0.125904607142414 (по умолчанию) | scalarОпрокидывающий момент, Mx, момент комбинированной нагрузки боковой силы и развала, QSX4, безразмерный.
Mx load effect due to lateral force and camber, QSX5 - Опрокидывающий момент1.01110069703963 (по умолчанию) | scalarОпрокидывающий момент, Mx, эффект нагрузки от боковой силы и развала, QSX5, безразмерный.
Mx load effect due to B-factor, QSX6 - Опрокидывающий момент20.1938577118433 (по умолчанию) | scalarОпрокидывающий момент, Mx, эффект нагрузки из-за B-фактора, QSX6, безразмерный.
Mx due to camber and load, QSX7 - Опрокидывающий момент0.310818120717083 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за развала и нагрузки, QSX7, безразмерный.
Mx due to lateral force and load, QSX8 - Опрокидывающий момент-0.0430823751139655 (по умолчанию) | scalarОпрокидывающий момент, Mx, от боковой силы и нагрузки, QSX8, безразмерный.
Mx due to B-factor of lateral force and load, QSX9 - Опрокидывающий момент0.636494404888216 (по умолчанию) | scalarОпрокидывающий момент, Mx, от B-фактора боковой силы и нагрузки, QSX9, безразмерный.
Mx due to vertical force and camber, QSX10 - Опрокидывающий момент0.142438060591663 (по умолчанию) | scalarОпрокидывающий момент, Mx, от вертикальной силы и развала, QSX10, безразмерный.
Mx due to B-factor of vertical force and camber, QSX11 - Опрокидывающий момент0.346766530036373 (по умолчанию) | scalarОпрокидывающий момент, Mx, от B-фактора вертикальной силы и развала, QSX11, безразмерный.
Mx due to squared camber, QSX12 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за квадратного развала, QSX12, безразмерный.
Mx due to lateral force, QSX13 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, от боковой силы, QSX13, безразмерный.
Mx due to lateral force with camber, QSX14 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, от боковой силы с разворотом, QSX14, безразмерный.
Mx due to inflation pressure, PPMX1 - Опрокидывающий момент из-за давления0 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за давления инфляции, PPMX1, безразмерный.
Cfy shape factor for lateral force, PCY1 - масштабный фактор боковой силы1.34299950037631 (по умолчанию) | scalarМасштабный фактор для боковой силы, Cfy, PCY1, безразмерной.
Lateral friction muy, PDY1 - Поперечное трение0.878267729082195 (по умолчанию) | scalarБоковое трение, μy, PDY1, безразмерное.
Lateral friction variation of muy with load, PDY2 - Изменение поперечного трения-0.0644597923147385 (по умолчанию) | scalarИзменение бокового трения, μy, с нагрузкой, PDY2, без размерности.
Lateral friction variation of muy with squared camber, PDY3 - Изменение поперечного трения0 (по умолчанию) | scalarИзменение бокового трения, μy, с квадратным развалом, PDY3, без размерности.
Efy lateral curvature at nominal force FZNOM, PEY1 - Боковая кривизна при номинальной силе-0.809776534470972 (по умолчанию) | scalarБоковая кривизна, Efy, от номинальной силы, FZNOM, PEY1, безразмерная.
Efy curvature variation with load PEY2 - Изменение поперечной кривизны-0.600180598867198 (по умолчанию) | scalarБоковое искривление, Efy, изменение с нагрузкой, PEY2, безразмерное.
Efy curvature constant camber dependency, PEY3 - Поперечная кривизна константы0.0991732552633487 (по умолчанию) | scalarБоковая кривизна, Efy, постоянная зависимость от развала, PEY3, безразмерность.
Efy curvature variation with camber, PEY4 - Изменение поперечной кривизны-6.5577974035573 (по умолчанию) | scalarБоковая кривизна, Efy, изменение с разворотом, PEY4, безразмерная.
Efy curvature variation with camber squared, PEY5 - Изменение поперечной кривизны0 (по умолчанию) | scalarБоковая кривизна, Efy, изменение с прямоугольным сечением, PEY5, без размерностей.
Maximum KFy/FZNOM stiffness, PKY1 - Максимальная жесткость-15.5714726518315 (по умолчанию) | scalarМаксимальная жесткость боковой силы, KFy, к номинальной силе, FZNOM, отношению, PKY1, без размерности.
Load at maximum KFy/FZNOM stiffness, PKY2 - Загрузка1.73126522291751 (по умолчанию) | scalarНагрузка при максимальной жесткости боковой силы, KFy, к номинальной силе, FZNOM, отношению, PKY2, безразмерной.
KFy/FZNOM stiffness variation with camber, PKY3 - Изменение жесткости0.365349873517229 (по умолчанию) | scalarЖесткость боковой силы, KFy, к номинальной силе, FZNOM, изменение жесткости с разворотом, PKY3, без размерностей.
KFy curvature, PKY4 - Кривизна жесткости боковой силы1.98176755955416 (по умолчанию) | scalarЖесткость боковой силы, KFy кривизна, PKY4, безразмерность.
Variation of peak stiffness with squared camber, PKY5 - Изменение жесткости0 (по умолчанию) | scalarИзменение пиковой жесткости с квадратным сечением, PKY5, без размерности.
Fy camber stiffness factor, PKY6 - Коэффициент жесткости ограничителя боковой силы-0.884005199550313 (по умолчанию) | scalarБоковая сила, Fy, коэффициент жесткости развала, PKY6, безразмерность.
Camber stiffness vertical load dependency, PKY7 - Жесткость-0.237259727611847 (по умолчанию) | scalarЗависимость вертикальной нагрузки кручения, PKY7, безразмерная.
SHY horizontal shift at FZNOM, PHY1 - Горизонтальный сдвиг при номинальной силе-0.00183370557235628 (по умолчанию) | scalarГоризонтальный сдвиг, SHY, при номинальной силе, FZNOM, PHY1, безразмерный.
SHY variation with load, PHY2 - Изменение горизонтального сдвига0.00346401302716671 (по умолчанию) | scalarГоризонтальный сдвиг, SHY, изменение с нагрузкой, PHY2, безразмерное.
Svy/Fz vertical shift at FZNOM, PVY1 - Вертикальный сдвиг при номинальной силе-0.00675427560163264 (по умолчанию) | scalarВертикальный сдвиг, Svy, при номинальной силе, FZNOM, PVY1, безразмерный.
Svy/Fz variation with load, PVY2 - Изменение вертикального сдвига с нагрузкой0.036379218103843 (по умолчанию) | scalarВертикальный сдвиг, Svy, изменение с нагрузкой, PVY2, без размерности.
Svy/Fz variation with camber, PVY3 - Изменение вертикального сдвига с развальцовкой-0.163543984089166 (по умолчанию) | scalarВертикальный сдвиг, Svy, изменение с разворотом, PVY3, безразмерный.
Svy/Fz variation with load and camber, PVY4 - Изменение вертикального сдвига с нагрузкой и развальцовкой-0.491003349625726 (по умолчанию) | scalarВертикальный сдвиг, Svy, изменение с нагрузкой и разворотом, PVY4, безразмерный.
Cornering stiffness variation with inflation pressure, PPY1 - Изменение жесткости при давлении-0.62059646553185 (по умолчанию) | scalarИзменение жесткости поворота при надувном давлении, PPY1, безразмерном.
Cornering stiffness variation with inflation pressure induced nominal load dependency, PPY2 - Изменение жесткости при давлении-0.0647824842338686 (по умолчанию) | scalarИзменение жесткости поворота с давлением надувания вызвало номинальную зависимость нагрузки, PPY2, безразмерную.
Linear inflation pressure on peak lateral friction, PPY3 - Давление-0.164648843290686 (по умолчанию) | scalarЛинейное давление надувания на пиковое боковое трение, PPY3, безразмерное.
Quadratic inflation pressure on peak lateral friction, PPY4 - Давление0.283193909060098 (по умолчанию) | scalarКвадратичное давление надувания на пиковое боковое трение, PPY4, безразмерное.
Inflation pressure effect on camber stiffness, PPY5 - Давление0 (по умолчанию) | scalarЭффект давления надувания на жесткость развала, PPY5, безразмерность.
Combined Fy reduction slope factor, RBY1 - Комбинированный коэффициент уменьшения поперечной силы10.7588809173639 (по умолчанию) | scalarКомбинированная боковая сила, Fy, коэффициент наклона редукции, RBY1, безразмерный.
Fy slope reduction with slip angle, RBY2 - Уменьшение наклона боковой силы с углом скольжения7.70420065295029 (по умолчанию) | scalarБоковая сила, Fy, уменьшение наклона с углом скольжения, RBY2, безразмерное.
Fy shift reduction with slip angle, RBY3 - Уменьшение смещения боковой силы с углом скольжения3.40283755070691e-06 (по умолчанию) | scalarБоковая сила, Fy, уменьшение сдвига с углом скольжения, RBY3, безразмерное.
Fy combined stiffness variation from camber, RBY4 - Боковая сила, объединенная изменением жесткости от развала0 (по умолчанию) | scalarБоковая сила, Fy, комбинированное изменение жесткости от развала, RBY4, безразмерное.
Fy combined reduction shape factor, RCY1 - Коэффициент формы комбинированного восстановления боковой силы1.06691874059059 (по умолчанию) | scalarБоковая сила, Fy, комбинированный масштабный фактор редукции, RCY1, безразмерная.
Fy combined curvature factor, REY1 - Комбинированный коэффициент кривизны боковой силы0.308244924574305 (по умолчанию) | scalarБоковая сила, Fy, комбинированный коэффициент кривизны, REY1, безразмерность.
Fy combined curvature factor with load, REY2 - Комбинированный коэффициент кривизны боковой силы с нагрузкой7.48775032604508e-06 (по умолчанию) | scalarБоковая сила, Fy, комбинированный коэффициент кривизны с нагрузкой, REY2, безразмерность.
Fy combined reduction shift factor, RHY1 - Коэффициент комбинированного переключения с боковой силой0.0118479204960415 (по умолчанию) | scalarБоковая сила, Fy, комбинированные коэффициенты сдвига восстановления, RHY1, безразмерные.
Fy combined reduction shift factor with load, RHY2 - Коэффициент комбинированного переключения боковой силы с нагрузкой7.63650177161071e-06 (по умолчанию) | scalarБоковая сила, Fy, комбинированный коэффициент сдвига сокращения с нагрузкой, RHY2, безразмерность.
Slip ratio side force Svyk/Muy*Fz at FZNOM, RVY1 - Сила скольжения коэффициента скольжения от номинальной силы0.0560024425050078 (по умолчанию) | scalarБоковая сила скольжения при номинальной силе, FZNOM, RVY1, безразмерной.
Side force Svyk/Muy*Fz variation with load, RVY2 - Изменение боковой силы с нагрузкой7.48487127056197e-06 (по умолчанию) | scalarИзменение боковой силы с нагрузкой, RVY2, без размерности.
Side force Svyk/Muy*Fz variation with camber, RVY3 - Изменение боковой силы с развальцовкой0 (по умолчанию) | scalarИзменение боковой силы с разворотом, RVY3, без размеров.
Side force Svyk/Muy*Fz variation with slip angle, RVY4 - Изменение боковой силы с углом скольжения98.4047026517149 (по умолчанию) | scalarИзменение боковой силы с углом скольжения, RVY4, без размерности.
Side force Svyk/Muy*Fz variation with slip ratio, RVY5 - Изменение боковой силы с коэффициентом скольжения2.02759273900054 (по умолчанию) | scalarИзменение боковой силы с коэффициентом скольжения, RVY5, без размерности.
Side force Svyk/Muy*Fz variation with slip ratio arctangent, RVY6 - Изменение боковой силы с коэффициентом скольжения, арктангенс15.7623064923347 (по умолчанию) | scalarИзменение боковой силы с отношением скольжения арктангенс, RVY6, безразмерно.
Torque resistance coefficient, QSY1 - Сопротивление крутящему моменту0.00699077564863536 (по умолчанию) | scalarКоэффициент сопротивления крутящего момента, QSY1, безразмерный.
Torque resistance due to Fx, QSY2 - Сопротивление крутящему моменту от продольной силы0 (по умолчанию) | scalarСопротивление крутящему моменту от продольной силы, Fx, QSY2, безразмерное.
Torque resistance due to speed, QSY3 - Сопротивление крутящему моменту из-за скорости0.00153535478298811 (по умолчанию) | scalarСопротивление крутящему моменту из-за скорости, QSY3, безразмерности.
Torque resistance due to speed^4, QSY4 - Сопротивление крутящему моменту из-за скорости8.55710322455322e-05 (по умолчанию) | scalarСопротивление крутящему моменту из-за скорости ^ 4, QSY4, безразмерное.
Torque resistance due to square of camber, QSY5 - Сопротивление крутящему моменту из-за кулачка0 (по умолчанию) | scalarСопротивление крутящему моменту из-за квадрата развала, QSY5, без размерности.
Torque resistance due to square of camber and load, QSY6 - Сопротивление крутящему моменту из-за развала и нагрузки0 (по умолчанию) | scalarСопротивление крутящему моменту от квадрата развала и нагрузки, QSY6, безразмерное.
Torque resistance due to load, QSY7 - Сопротивление крутящему моменту от нагрузки0.89443879773793 (по умолчанию) | scalarСопротивление крутящему моменту от нагрузки, QSY7, без размерности.
Torque resistance due to pressure, QSY8 - Сопротивление крутящему моменту из-за давления-0.403227641260894 (по умолчанию) | scalarСопротивление крутящему моменту из-за давления, QSY8, безразмерности.
Trail slope factor for trail Bpt at FZNOM, QBZ1 - Коэффициент наклона тропы от номинальной силы11.666656027484 (по умолчанию) | scalarКоэффициент наклона тракта для тракта Bpt при номинальной силе, FZNOM, QBZ1, без размерности.
Bpt slope variation with load, QBZ2 - Изменение уклона с нагрузкой-1.30355438574485 (по умолчанию) | scalarИзменение наклона с нагрузкой, QBZ2, без размерности.
Bpt slope variation with square of load, QBZ3 - Изменение уклона с нагрузкой0 (по умолчанию) | scalarИзменение наклона с квадратом нагрузки, QBZ3, без размерности.
Bpt slope variation with camber, QBZ4 - Изменение уклона с развальцовкой0.177918305399071 (по умолчанию) | scalarИзменение уклона с разворотом, QBZ4, без размеров.
Bpt slope variation with absolute value of camber, QBZ5 - Изменение уклона с развальцовкой-0.162481135068033 (по умолчанию) | scalarИзменение наклона с абсолютным значением camber, QBZ5, без размерности.
Bpt slope variation with square of camber, QBZ6 - Изменение уклона с развальцовкой0 (по умолчанию) | scalarИзменение уклона с квадратом развала, QBZ6, без размерности.
Br of Mzr slope scaling factor, QBZ9 - Коэффициент масштабирования откоса30.1445534682089 (по умолчанию) | scalarМасштабный коэффициент наклона, QBZ9, безразмерный.
Br of Mzr cornering stiffness factor, QBZ10 - Коэффициент жесткости поворота0 (по умолчанию) | scalarBr коэффициента жесткости поворота Mzr, QBZ10, безразмерный.
Cpt pneumatic trail shape factor, QCZ1 - Коэффициент формы пневматического штока1.29026978207574 (по умолчанию) | scalarПневматический масштабный фактор тропы, Cpt, QCZ1, безразмерный.
Dpt peak trail, QDZ1 - Пиковая трасса0.0886972644991399 (по умолчанию) | scalarПик следа, Dpt, QDZ1, безразмерный.
Dpt peak trail variation with load, QDZ2 - Пиковое изменение штока с нагрузкой-0.0058634820161856 (по умолчанию) | scalarПик шлейфа, Dpt, изменение с нагрузкой, QDZ2, безразмерный.
Dpt peak trail variation with camber, QDZ3 - Пиковое изменение тропы с развальцовкой0.3805597481383 (по умолчанию) | scalarПик следа, Dpt, изменение с развалом, QDZ3, безразмерный.
Dpt peak trail variation with square of camber, QDZ4 - Пиковое изменение тропы с развальцовкой0 (по умолчанию) | scalarПик следа, Dpt, изменение с квадратом развала, QDZ4, без размерности.
Dmr peak residual torque, QDZ6 - Пиковый остаточный крутящий момент0.00160914918118959 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, QDZ6, безразмерный.
Dmr peak residual torque variation with load, QDZ7 - Пиковая невязка крутящего момента с нагрузкой-0.00211036330862154 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с нагрузкой, QDZ7, безразмерный.
Dmr peak residual torque variation with camber, QDZ8 - Пиковая невязка крутящего момента с развальцовкой-0.13921904912557 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с разворотом, QDZ8, безразмерный.
Dmr peak residual torque variation with camber and load, QDZ9 - Пиковая невязка крутящего момента с развальцовкой и нагрузкой0.00816585550028243 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с разворотом и нагрузкой, QDZ9, безразмерный.
Dmr peak residual torque variation with square of camber, QDZ10 - Пиковая невязка крутящего момента с развальцовкой0 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом развала, QDZ10, без размерности.
Dmr peak residual torque variation with square of load, QDZ11 - Пиковая невязка крутящего момента с нагрузкой0 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом нагрузки, QDZ11, безразмерный.
Ept trail curvature at FZNOM, QEZ1 - Кривизна штока от номинальной силы-2.19802254534746 (по умолчанию) | scalarКривизна тропы, Ept, при номинальной силе, FZNOM, QEZ1, без размерности.
Ept variation with load, QEZ2 - Изменение кривизны штока с нагрузкой1.01850535789165 (по умолчанию) | scalarКривизна тропы, изменение Ept с нагрузкой, QEZ2, безразмерное.
Ept variation with square of load, QEZ3 - Изменение кривизны штока с нагрузкой0 (по умолчанию) | scalarКривизна тропы, изменение Ept с квадратом нагрузки, QEZ3, безразмерное.
Ept variation with sign of alpha-t, QEZ4 - Изменение кривизны штока0.278379679112054 (по умолчанию) | scalarКривизна тропы, изменение Ept со знаком альфа-t, QEZ4, безразмерно.
Ept variation with sign of alpha-t and camber, QEZ5 - Изменение-0.548414722765386 (по умолчанию) | scalarКривизна тропы, изменение Ept со знаком альфа-t и развала, QEZ5, безразмерное.
Sht horizontal trail shift at FZNOM, QHZ1 - Горизонтальный сдвиг штока при номинальной нагрузке0.00148361198869669 (по умолчанию) | scalarГоризонтальный сдвиг тракта, Sht, при номинальной нагрузке, FZNOM, QHZ1, безразмерный.
Sht variation with load, QHZ2 - Изменение сдвига горизонтального тракта с нагрузкой0.00202017567585904 (по умолчанию) | scalarГоризонтальный сдвиг следа, Sht, изменение с нагрузкой, QHZ2, безразмерный.
Sht variation with camber, QHZ3 - Изменение сдвига горизонтального тракта с развальцовкой0.240316641332066 (по умолчанию) | scalarГоризонтальный сдвиг следа, Sht, изменение с разворотом, QHZ3, безразмерный.
Sht variation with load and camber, QHZ4 - Изменение сдвига горизонтального штока с нагрузкой и развальцовкой-0.210114035738085 (по умолчанию) | scalarГоризонтальный сдвиг следа, Sht, изменение с нагрузкой и разворотом, QHZ4, безразмерный.
Inflation pressure influence on trail length, PPZ1 - Влияние давления на длину штока-0.443927982388615 (по умолчанию) | scalarДавление надувания влияет на длину, PPZ1, безразмерное.
Inflation pressure influence on residual aligning torque, PPZ2 - Влияние давления на центрирующий крутящий момент0 (по умолчанию) | scalarДавление надувания влияет на остаточный крутящий момент, PPZ2, безразмерный.
Nominal value of s/R0: effect of Fx on Mz, SSZ1 - Эффект продольной силы на центрирующий крутящий момент0.00914999585397887 (по умолчанию) | scalarНоминальное значение s/R0: эффект продольной силы, Fx, на центрирующий крутящий момент, Mz, SSZ1, безразмерный.
s/R0 variation with lateral to nominal force ratio, SSZ2 - Изменение с отношением боковой силы к номинальной0.0389830656052735 (по умолчанию) | scalarИзменение с отношением боковой силы к номинальной, SSZ2, безразмерное.
s/R0 variation with camber, SSZ3 - Изменение с развальцовкой0 (по умолчанию) | scalarИзменение с разворотом, SSZ3, без размерности.
s/R0 variation with camber and load, SSZ4 - Изменение с разворотом и нагрузкой0 (по умолчанию) | scalarИзменение с разворотом и нагрузкой, SSZ4, безразмерная.
Fx peak reduction due to spin, PDXP1 - Пиковое уменьшение продольной силы из-за вращения0.396718274678791 (по умолчанию) | scalarПродольная сила, Fx, пиковое уменьшение из-за спина, PDXP1, безразмерное.
Fx peak reduction due to spin with varying load, PDXP2 - Пиковое уменьшение продольной силы из-за вращения0 (по умолчанию) | scalarПродольная сила, Fx, уменьшение пика от вращения с переменной нагрузкой, PDXP2, безразмерное.
Fx peak reduction due to spin with slip ratio, PDXP3 - Пиковое уменьшение продольной силы из-за вращения0 (по умолчанию) | scalarПродольная сила, Fx, пиковое уменьшение за счет вращения с отношением скольжения, PDXP3, безразмерное.
Cornering stiffness reduction due to spin, PKYP1 - Снижение жесткости из-за вращения1.00587060633573 (по умолчанию) | scalarСнижение жесткости поворота за счет вращения, PKYP1, безразмерности.
Fy peak reduction due to spin, PDYP1 - Пиковое уменьшение боковой силы из-за вращения0.40483048923438 (по умолчанию) | scalarБоковая сила, Fy, пиковое уменьшение из-за спина, PDYP1, безразмерное.
Fy peak reduction due to spin with varying load, PDYP2 - Пиковое уменьшение боковой силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, пиковое уменьшение из-за вращения с переменной нагрузкой, PDYP2, безразмерное.
Fy peak reduction due to spin with slip angle, PDYP3 - Пиковое уменьшение боковой силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, пиковое уменьшение из-за вращения с углом скольжения, PDYP3, безразмерное.
Fy peak reduction due to square root of spin, PDYP4 - Пиковое уменьшение боковой силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, пиковое уменьшение из-за квадратного корня спина, PDYP4, безразмерное.
Fy vs. slip angle response lateral shift limit, PHYP1 - Боковая сила от отклика угла скольжения0.992731942067188 (по умолчанию) | scalarБоковая сила, Fy, от предела поперечного сдвига отклика угла скольжения, PHYP1, безразмерная.
Fy vs. slip angle response max lateral shift limit, PHYP2 - Боковая сила от отклика угла скольжения0.150352945499914 (по умолчанию) | scalarБоковая сила, Fy, от отклика угла скольжения, макс. предел бокового сдвига, PHYP2, безразмерный.
Fy vs. slip angle response max lateral shift limit with load, PHYP3 - Боковая сила от отклика угла скольжения0 (по умолчанию) | scalarБоковая сила, Fy, от отклика угла скольжения, макс. предел бокового сдвига с нагрузкой, PHYP3, безразмерный.
Fy vs. slip angle response lateral shift curvature factor, PHYP4 - Боковая сила от отклика угла скольжения-3.98988682633674 (по умолчанию) | scalarБоковая сила, Fy, от отклика угла скольжения, коэффициент кривизны сдвига, PHYP4, безразмерный.
Camber stiffness reduction due to spin, PECP1 - Снижение жесткости развала0.502379254513503 (по умолчанию) | scalarУменьшение жесткости развала из-за вращения, PECP1, безразмерности.
Camber stiffness reduction due to spin with load, PECP2 - Снижение жесткости развала0 (по умолчанию) | scalarУменьшение жесткости развала из-за вращения с нагрузкой, PECP2, безразмерное.
Turn slip pneumatic trail reduction factor, QDTP1 - Повернуть скольжение пневматического коэффициента сокращения штока10.0178654287947 (по умолчанию) | scalarПоверните скользящий пневматический коэффициент сокращения штока, QDTP1, безразмерный.
Turn moment for constant turning and zero longitudinal speed, QCRP1 - Поворотный момент для постоянного поворота0.200627747200702 (по умолчанию) | scalarПоворотный момент для постоянного поворота и нулевой продольной скорости, QCRP1, безразмерный.
Turn slip moment increase with spin at 90deg slip angle, QCRP2 - Крутящий момент поворота0.0995735881599772 (по умолчанию) | scalarВращайте увеличение скольжения со спином на 90-градусный угол скольжения, QCRP2, безразмерный.
Residual spin torque reduction from side slip, QBRP1 - Уменьшение крутящего момента остаточного вращения0.0997107127960717 (по умолчанию) | scalarУменьшение крутящего момента остаточного вращения от бокового скольжения, QBRP1, безразмерное.
Turn slip moment peak magnitude, QDRP1 - Поверните пиковую величину скольжения1.01432910167423 (по умолчанию) | scalarПоверните пиковую величину, QDRP1, безразмерную.
Turn slip moment curvature, QDRP2 - Вращайте искривление момента скольжения0 (по умолчанию) | scalarПоверните искривление скольжения, QDRP2, безразмерное.
[1] Besselink, I. J, M., A. J. C. Schmeitz, and H. B. Pacejka. «Улучшенная модель Magic Formula/Swift шины, которая может справиться с скачками давления инфляции». Vehicle System Dynamics - International Journal of Vehicle Mechanics and Mobility. Том 48, 2010. doi: 10,1080/ 00423111003748088.
[2] Pacejka, H. B. Tire and Динамика Аппарата. 3-й эд. Оксфорд, Великобритания: SAE и Butterworth-Heinemann, 2012.
[3] Schmid, Steven R., Bernard J. Hamrock, and Bo O. Jacobson. Глава 18: Тормоза и сцепления. Основы элементов машины, версия СИ. 3-й эд. Бока Ратон, FL: CRC Press, 2014.
[1] Переиздание с разрешения Copyright © 2008 SAE International. Дальнейшее распределение этого материала не допускается без предварительного разрешения SAE.
