Динамическое рулевое управление для Ackerman, реечных и параллельных механизмов рулевого управления
Динамика автомобиля Blockset/Рулевое управление
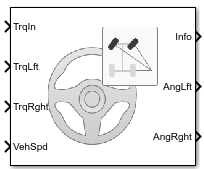
Блок Dynamic Steering реализует динамическое рулевое управление, чтобы вычислить углы колеса для Ackerman, реечного механизма и параллельных механизмов рулевого управления. Блок использует входной крутящий момент рулевого колеса, крутящий момент правого колеса и крутящий момент левого колеса, чтобы вычислить углы колеса. Блок использует систему координат транспортного средства.
Если вы выбираете Power assist, можно задать интерполяционную таблицу крутящего момента, которая является функцией скорости транспортного средства и входного крутящего момента рулевого колеса. Блок использует входной крутящий момент рулевого колеса и вспомогательный крутящий момент, чтобы вычислить динамику рулевого управления.
Чтобы задать тип рулевого управления, используйте параметр Type.
| Настройка | Реализация блока |
|---|---|
| Идеальное рулевое управление Ackerman. Углы колеса имеют общий центр круга поворота. |
| Идеальное рулевое управление в реечном механизме. Передачи преобразуют вращение рулевого управления в линейное движение. |
| Параллельное рулевое управление. Углы колес равны. |
Чтобы задать тип данных для механизма рулевого управления, используйте параметр Parametrized by.
| Настройка | Реализация блока |
|---|---|
| Механизм управления использует постоянные данные параметра. |
| Механизм управления реализует таблицы для данных о параметрах. |
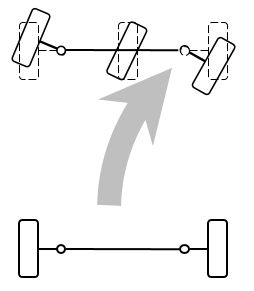
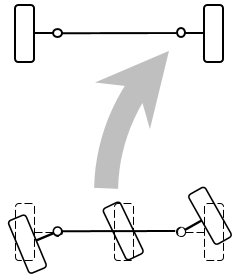
Используйте параметр Location, чтобы задать рулевое управление спереди или сзади.
| Настройка | Реализация |
|---|---|
| Front |
Рулевое управление спереди
|
| Rear |
Заднее рулевое управление
|
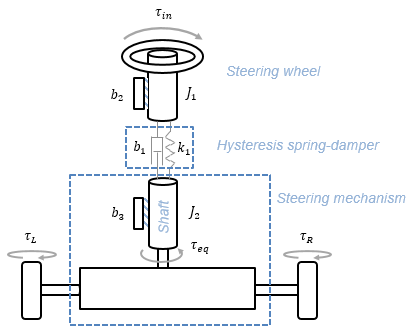
Чтобы вычислить динамику рулевого управления, Dynamic Steering блок моделирует рулевое колесо, вал, механизм рулевого управления, гистерезис и, опционально, помощь в степени.
| Вычисление | Уравнения |
|---|---|
|
Динамика рулевого столбца и рулевого вала |
|
|
Гистерезисный пружинный демпфер |
|
|
Опциональная поддержка степени |
|
Рисунок и уравнения используют эти переменные.
| J1 |
Инерция руля |
| J2 |
Инерция рулевого механизма |
|
Угол руля, скорость вращения и угловое ускорение, соответственно | |
|
Угол вала, скорость вращения и угловое ускорение, соответственно | |
| b1, k1 |
Пружина гистерезиса и вязкие коэффициенты демпфирования, соответственно |
| b2 |
Вязкие коэффициенты демпфирования руля |
| b3 |
Коэффициент демпфирования рулевого механизма |
| τhys |
Гистерезисный крутящий момент демпфирования пружины |
| τfric |
Момент трения механизма рулевого управления |
| τeq |
Эквивалентный крутящий момент колеса |
| τast |
Ассистент по крутящему моменту |
| βu , βl |
Верхний и нижний модификаторы гистерезиса, соответственно |
| v |
Скорость транспортного средства |
| ƒtrq |
Интерполяционная таблица помощи по крутящему моменту |
Для идеального рулевого управления Ackerman углы колеса имеют общий круг поворота.
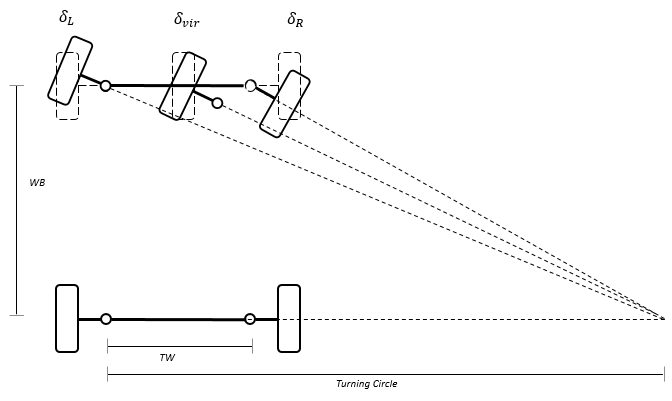
Чтобы вычислить углы поворота, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Угол поворота руля |
| δL |
Угол левого колеса |
| δR |
Угол правого колеса |
| δvir |
Угол виртуального колеса |
| TW |
Ширина дорожки |
| WB |
Основа колеса |
| γ |
Коэффициент рулевого управления |
Для идеального управления реечным механизмом передачи преобразуют вращение рулевого управления в линейное движение.
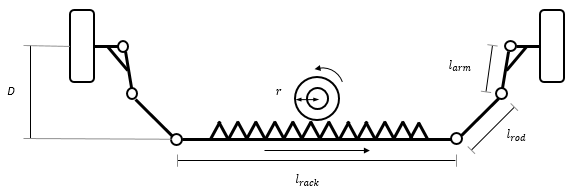
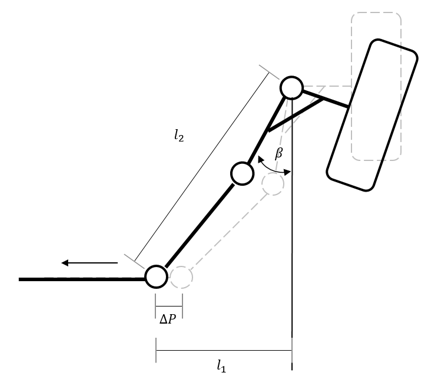
Чтобы вычислить углы поворота, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Угол поворота руля |
| δL |
Угол левого колеса |
| δR |
Угол правого колеса |
| TW |
Ширина дорожки |
| r |
Радиус шестерни |
| ΔP |
Линейное изменение положения стойки |
| D |
Расстояние между передней осью и стойкой |
| lrack |
Длина корпуса стойки |
| larm |
Длина рулевого рычага |
| lrod |
Длина тяги |
Для параллельного рулевого управления углы колеса равны.
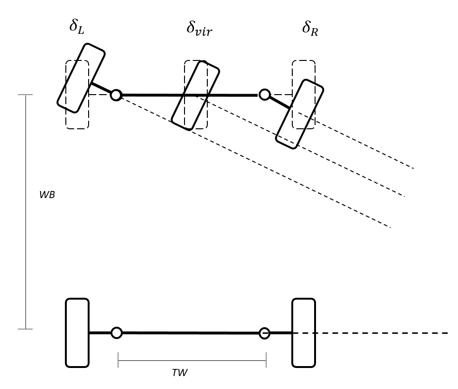
Чтобы вычислить углы поворота, блок использует это уравнение.
Рисунок и уравнения используют эти переменные.
| δin |
Угол поворота руля |
| δL |
Угол левого колеса |
| δR |
Угол правого колеса |
| γ |
Коэффициент рулевого управления |
Type - Выберите тип рулевого управленияRack and pinion (по умолчанию) | Ackerman | ParallelЧтобы задать тип рулевого управления, используйте параметр Type.
| Настройка | Реализация блока |
|---|---|
| Идеальное рулевое управление Ackerman. Углы колеса имеют общий центр круга поворота. |
| Идеальное рулевое управление в реечном механизме. Передачи преобразуют вращение рулевого управления в линейное движение. |
| Параллельное рулевое управление. Углы колес равны. |
В этой таблице представлены Type и Parametrized by зависимости параметров.
| Напечатать | Параметризация по | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Parametrized by - Выберите параметризациюLookup table (по умолчанию) | ConstantЧтобы задать тип данных для механизма рулевого управления, используйте параметр Parametrized by.
| Настройка | Реализация блока |
|---|---|
| Механизм управления использует постоянные данные параметра. |
| Механизм управления реализует таблицы для данных о параметрах. |
В этой таблице представлены Type и Parametrized by зависимости параметров.
| Напечатать | Параметризация по | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Power assist - Задайте вспомогательную степеньon (по умолчанию) | offЕсли вы выбираете Power assist, можно задать интерполяционную таблицу, ƒtrq, которая является функцией скорости автомобиля, v и входного крутящего момента руля, τin.
Блок использует входной крутящий момент рулевого колеса и вспомогательный крутящий момент, чтобы вычислить динамику рулевого управления.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Location - Выберите местоположениеИспользуйте параметр Location, чтобы задать рулевое управление спереди или сзади.
| Настройка | Реализация |
|---|---|
| Front |
Рулевое управление спереди
|
| Rear |
Заднее рулевое управление
|
Track width, TrckWdth - Ширина1 | scalarШирина дорожки, TW, в м.
Чтобы создать этот параметр, установите Type равным Ackerman или Rack and pinion.
Wheel base, WhlBase - Основа1.524 (по умолчанию) | scalarОснова колеса, WB, в м.
Чтобы создать этот параметр, установите Type равным Ackerman.
Steering range, StrgRng - Область значений1.25*pi (по умолчанию) | scalarРулевая область значений, в рад. Блок ограничивает углы колеса, чтобы остаться в область значений рулевого управления.
Steering ratio, StrgRatio - Коэффициент13.5 (по умолчанию) | scalarКоэффициент рулевого управления, γ, безразмерный.
Чтобы создать этот параметр:
Установите Type значение Ackerman или Parallel.
Установите Parametrized by значение Constant.
Steering angle breakpoints, StrgAngBpts - Точки останова[-6.2832 -5.0265 -3.7699 -2.5133 -1.2566 0 1.2566 2.5133 3.7699 5.0265 6.2832] (по умолчанию) | vectorТочки останова угла поворота, в рад.
Чтобы создать этот параметр, установите Parametrized by равным Lookup table.
Steering ratio table, StrgRatioTbl - Таблица[13.5000 13.3750 13.2500 13.1250 13.0000 13.0000 13.0000 13.1250 13.2500 13.3750 13.5000] (по умолчанию) | vectorТаблица коэффициента рулевого управления, γ, безразмерная.
Чтобы создать этот параметр:
Установите Type значение Ackerman или Parallel.
Установите Parametrized by значение Lookup table.
Steering arm length, StrgArmLngth - Длина0.1 (по умолчанию) | scalarДлина рулевого рычага, larm, в м.
Чтобы создать этот параметр, установите Type равным Rack and pinion.
Rack casing length, RckCsLngth - Длина0.5 (по умолчанию) | scalarДлина корпуса стойки, lrack, в м.
Чтобы создать этот параметр, установите Type равным Rack and pinion.
Tie rod length, TieRodLngth - Длина0.248 (по умолчанию) | scalarДлина тяги, lrod, в м.
Чтобы создать этот параметр, установите Type равным Rack and pinion.
Distance between front axis and rack, D - Расстояние0.2 (по умолчанию) | scalarРасстояние между передней осью и стойкой, D, в м.
Чтобы создать этот параметр, установите Type равным Rack and pinion.
Pinion radius, PnnRadius - Радиус0.0057 (по умолчанию) | scalarРадиус шестерни, r, в м.
Чтобы создать этот параметр:
Установите Type значение Rack and pinion.
Установите Parametrized by значение Constant.
Pinion radius table, PnnRadiusTbl - Таблица[0.0055 0.0055 0.0056 0.0057 0.0057 0.0057 0.0058 0.0057 0.0056 0.0055 0.0055] (по умолчанию) | vectorТаблица радиуса шестерни, r, в м.
Чтобы создать этот параметр:
Установите Type значение Rack and pinion.
Установите Parametrized by значение Lookup table.
Steering wheel inertia, J1 - Инерция0.1 (по умолчанию) | scalarИнерция руля, J1, в кг * м ^ 2.
Steering mechanism inertia, J2 - Инерция0.01 (по умолчанию) | scalarИнерция рулевого механизма, J2, в кг * м ^ 2.
Upper hysteresis modifier, beta_u - Модификатор верхнего гистерезиса0.1 (по умолчанию) | scalarМодификатор верхнего гистерезиса, βu, безразмерный.
Lower hysteresis modifier, beta_l - Модификатор нижнего гистерезиса0.1 (по умолчанию) | scalarМодификатор нижнего гистерезиса, βl, безразмерный.
Hysteresis viscous damping, b1 - Демпфирование0.001 (по умолчанию) | scalarГистерезисное демпфирование, b1, в Н· м· с/рад.
Hysteresis stiffness, k1 - Жесткость30 (по умолчанию) | scalarЖесткость гистерезиса, k1, в Н· м/рад.
Steering wheel damping, b2 - Демпфирование1 (по умолчанию) | scalarДемпфирование руля, b2, в Н· м· с/рад.
Steering mechanism damping, b3 - Демпфирование0.001 (по умолчанию) | scalarДемпфирование рулевого механизма, b3, в Н· м· с/рад.
Initial steering angle, theta_o - Угол0 (по умолчанию) | scalarНачальный угол поворота, θ0, в рад.
Initial steering angular velocity, omega_o - Скорость вращения0 (по умолчанию) | scalarНачальная скорость вращения рулевого управления, ωo, в рад/с.
Friction torque, FricTrq - Крутящий момент0 (по умолчанию) | scalarКрутящий момент трения, τfric, в Н· м.
Steering wheel torque breakpoints, TrqBpts - Точки останова[-100 0 100] (по умолчанию) | 1-by- M векторТочки останова крутящего момента рулевого колеса, в Н· м.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Vehicle speed breakpoints, VehSpdBpts - Точки останова[0 20] (по умолчанию) | 1-by- N векторТочки останова скорости транспортного средства, в м/с.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque table, TrqTbl - 2D таблицы крутящих моментов[0 -100;0 0;0 100] (по умолчанию) | M-by- N матрицаВспомогательный крутящий момент, ƒtrq, в Н· м.
Интерполяционная таблица содействия крутящему моменту является функцией от скорости транспортного средства, v и входа крутящего момента рулевого колеса, τin.
Блок использует входной крутящий момент рулевого колеса и вспомогательный крутящий момент, чтобы вычислить динамику рулевого управления.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque limit, TrqLmt - Предел крутящего момента100 (по умолчанию) | scalarВспомогательный предел крутящего момента, в Н· м.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting power limit, PwrLmt - Предел степени1000 (по умолчанию) | scalarВспомогательный предел степени, в Н· м/с.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque efficiency, Eta - Эффективность1 (по умолчанию) | scalarСодействие эффективности крутящего момента, без размерности.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Cutoff frequency, omega_c - Частота отключения200 (по умолчанию) | scalarЧастота отсечения, в рад/с.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Помощь в степени | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
[1] Crolla, David, David Foster, et al. Энциклопедия автомобильной техники. Том 4, Часть 5 (Системы шасси) и Часть 6 (Электрические и электронные системы). Chichester, West Sussex, Великобритания: John Wiley & Sons Ltd, 2015.
[2] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Общество автомобильных инженеров, 1992.
[3] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. J670 SAE. Warrendale, PA: Общество автомобильных инженеров, 2008.