Трехосное транспортное средство трактора с поступательным и вращательным движением
Динамика автомобиля транспортное средство
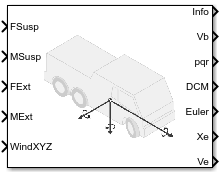
Блок Vehicle Body 6DOF Three Axles реализует модель жесткого трехосного кузова транспортного средства с шестью степенями свободы (DOF), которая вычисляет продольное, боковое, вертикальное, тангаж, крен и движение рыскания. Используйте блок, чтобы смоделировать трехосные транспортные средства, как трактор. Блок учитывает массу тела, инерцию, аэродинамическое сопротивление, наклон дороги и распределение веса между местоположениями жестких точек оси из-за подвески и внешних сил и моментов. Используйте параметры Inertial Loads для анализа динамики аппарата при различных условиях загрузки.
Соедините блок с виртуальными датчиками, системами подвески или внешними системами, такими как приводы управления телом. Используйте блок Vehicle Body 6DOF Three Axles в исследованиях езды и обработки, чтобы смоделировать эффекты сил сопротивления, загрузки пассажиров и расположения точек подвески подвески.
Чтобы создать дополнительные порты входа, под Input signals выберите эти параметры блоков.
Параметр | Input port | Описание |
|---|---|---|
| Front hitch forces | FhF | Сила сцепки, приложенная к корпусу в месте передней сцепки, FhFx, FhFy и FhFz, в неподвижной системе координат автомобиля |
| Front hitch moments | MhF | Момент сцепки в местоположении передней сцепки, MhFx, MhFy и MhFz, вокруг неподвижной системы координат автомобиля |
| Rear hitch forces | FhR | Сила сцепления, приложенная к корпусу в месте задней сцепки, FhRx, FhRy и FhRz, в неподвижной системе координат автомобиля |
| Rear hitch moments | MhR | Момент сцепки в месте задней сцепки, MhRx, MhRy и MhRz, вокруг неподвижной системы координат автомобиля |
Для анализа динамики аппарата при различных условиях загрузки используйте параметры Inertial Loads. Можно задать следующие нагрузки:
Тракторный фронт
Накладные расходы на кабину
Трактор системы координат слева и система координат справа
Кабина слева и кабина справа
Трактор задний
Для каждой из нагрузок можно задать массу, расположение и инерцию.
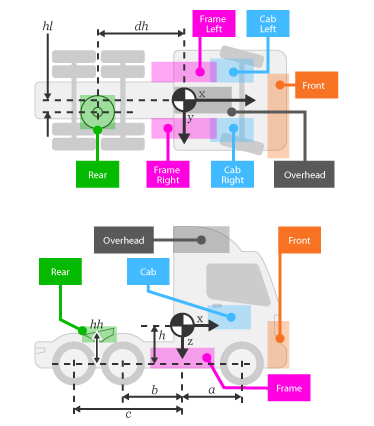
Рисунки обеспечивают расположение нагрузки и размерности параметра транспортного средства. Таблица содержит соответствующие настройки знака параметра местоположения.
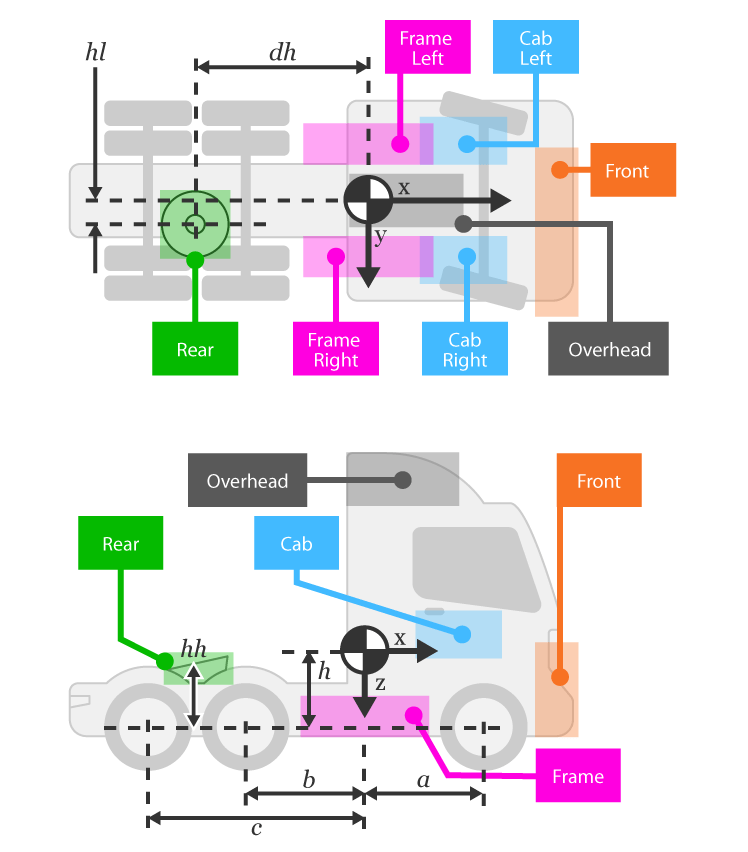
В этой таблице приведены настройки параметров, которые задают местоположения нагрузок, обозначенные точками. Для расположения блок использует этот вектор расстояния:
Передняя ось для загрузки вдоль фиксированной оси X автомобиля
Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля
Передняя ось для загрузки вдоль фиксированной оси Z автомобиля
Груз | Параметр | Расположение примера |
|---|---|---|
Тракторный фронт | Distance vector from front axle, z1R |
|
Накладные расходы на кабину | Distance vector from front axle, z2R |
|
Трактор системы координат слева | Distance vector from front axle, z3R |
|
Тракторная система координат справа | Distance vector from front axle, z4R |
|
Кабина слева | Distance vector from front axle, z5R |
|
Кабина справа | Distance vector from front axle, z6R |
|
Трактор задний | Distance vector from front axle, z7R |
|
Чтобы определить транспортное средство движение, блок реализует вычисления для твердой динамики аппарата тела, сопротивления ветра, инерционных нагрузок и координатных преобразований. Системы координат с фиксированным и неподвижным телом одинаковы.
Блок рассматривает вращение фиксированной по телу координатной системы координат вокруг плоской фиксированной по земле инерционной системы отсчета. Источник координатной системы координат тела является транспортным средством центром тяжести тела.
Блок использует это уравнение, чтобы вычислить поступательное движение фиксированной в теле координатной системы координат, где приложенные силы [Fx Fy Fz]T находятся в неподвижной системе координат, и масса тела, m, принята постоянной.
Чтобы определить связь между вектором скорости вращения с фиксированным телом, [p q r]Tи скорость изменения углов Эйлера, блок разрешает скорости Эйлера в фиксированную систему координат тела.
Инвертирование J дает необходимую зависимость, чтобы определить вектор скорости Эйлера.
Приложенные силы и моменты являются суммой сил сопротивления, гравитационных, внешних и подвесных сил.
| Вычисление | Реализация |
|---|---|
Загрузка масс и инерций | Блок использует теорему о параллельной оси, чтобы разрешить отдельные массы нагрузки и инерцию с транспортным средством массой и инерцией. |
Гравитационные силы, Fg | Блок использует матрицу косинуса направления (DCM), чтобы преобразовать гравитационный вектор в инерционно-фиксированной системе координат в фиксированную систему координат тела. |
Перетащите силы, Fd и моменты, Md | Чтобы определить относительную воздушную скорость, блок вычитает скорость ветра из скорости центра масс ( CM) транспортного средства. Используя относительную воздушную скорость, блок определяет силы сопротивления. Используя относительную воздушную скорость, блок определяет моменты перетаскивания. |
Внешние силы, Fin и моменты, Min | Внешние силы и моменты вводятся через порты FExt и MExt. |
Силы и моменты подвески | Блок принимает, что силы и моменты подвески действуют на эти положения точки подвески:
|
В уравнениях используются эти переменные.
Перемещение, скорость и ускорение CM транспортного средства вдоль фиксированной оси X | |
Перемещение, скорость и ускорение CM транспортного средства вдоль фиксированной оси Y | |
Перемещение, скорость и ускорение CM транспортного средства вдоль фиксированной оси Z автомобиля | |
φ | Вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси X (крен) |
θ | Вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Y (тангаж) |
ψ | Вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание) |
| FFLx, FFLy, FFLz | Силы подвески, приложенные к передней левой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| FFRx, FFRy, FFRz | Силы подвески, приложенные к передней правой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| FMLx, FMLy, FMLz | Силы подвески, приложенные к средней левой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| FMRx, FMRy, FMRz | Силы подвески, приложенные к средней правой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| FRLx, FRLy, FRLz | Силы подвески, приложенные к задней левой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| FRRx, FRRy, FRRz | Силы подвески, приложенные к задней правой точке подвески вдоль фиксированных осей X, Y и Z автомобиля |
| MFLx, MFLy, MFLz | Момент подвески, приложенный к левой передней точке подвески вокруг фиксированных осей X, Y и Z автомобиля |
| MFRx, MFRy, MFRz | Момент подвески, приложенный к передней правой точке подвески вокруг фиксированных x -, y - и z-осей автомобиля |
| MMLx, MMLy, MMLz | Момент подвески, приложенный к средней левой точке подвески вокруг фиксированных x -, y - и z-осей автомобиля |
| MMRx, MMRy, MMRz | Момент подвески, приложенный к средней правой точке подвески вокруг фиксированных x -, y - и z-осей автомобиля |
| MRLx, MRLy, MRLz | Момент подвески, приложенный к задней левой точке подвески вокруг фиксированных осей X, Y и Z автомобиля |
| MRRx, MRRy, MRRz | Момент подвески, приложенный к задней правой точке подвески вокруг фиксированных x -, y - и z-осей автомобиля |
| Fextx, Fexty, Fextz | Внешние силы, приложенные к транспортные средства вдоль фиксированных осей X, Y и Z автомобиля |
| Fdx, Fdy, Fdz | Силы перетаскивания, приложенные к транспортные средства, вдоль фиксированных осей X, Y и Z автомобиля |
| Mextx, Mexty, Mextz | Внешний момент вокруг CM транспортного средства вокруг фиксированных x -, y - и z-осей автомобиля |
| Mdx, Mdy, Mdz | Перетащите момент вокруг транспортного средства вокруг фиксированных осей X, Y и Z автомобиля |
| I | Моменты инерции тела транспортного средства |
| a, b, c | Расстояние между передней, средней и задней осями, соответственно, от нормальной проекционной точки CM транспортного средства до плоскости общей оси |
| h | Высота транспортного средства CM над плоскостью оси |
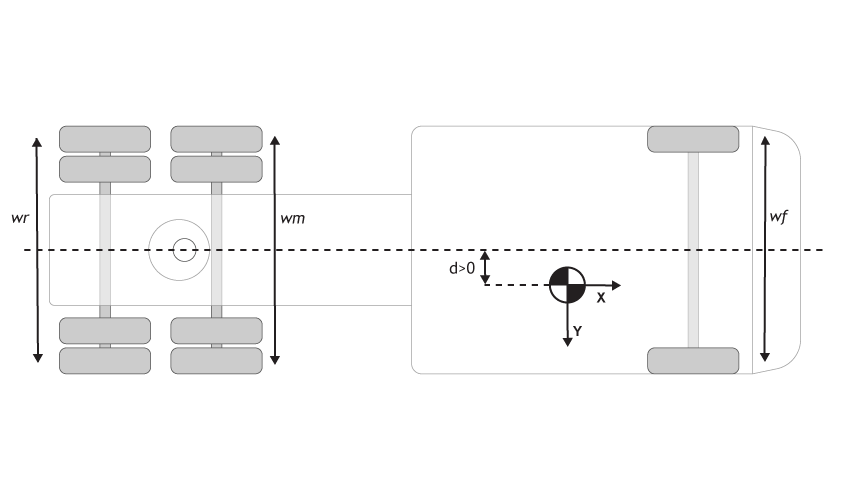
| d | Боковое расстояние от геометрической осевой линии до центра масс вдоль фиксированной оси Y автомобиля |
hh_f, hh_r | Высота передней и задней сцепок, соответственно, над плоскостью оси вдоль фиксированной оси Z автомобиля |
dh_f, dh_r | Продольное расстояние передней и задней сцепок, соответственно, от точки нормальной проекции CM транспортного средства до плоскости общей оси |
hl_f, hl_r | Боковое расстояние от центра масс до передней и задней сцепок, соответственно, вдоль фиксированной по оси Y автомобиля |
| wF, wM, wR | Ширина передней, средней и задней дорожек, соответственно |
| Cd | Коэффициент сопротивления воздуха, действующий вдоль фиксированной оси X автомобиля |
| Cs | Коэффициент сопротивления воздуха, действующий вдоль фиксированной по оси Y автомобиля |
| Cl | Коэффициент сопротивления воздуха, действующий вдоль фиксированной оси Z автомобиля |
| Crm | Перетащите воздух крена момент, действующий вокруг фиксированной оси X автомобиля |
| Cpm | Момент тангажа сопротивления воздуха, действующий вокруг фиксированной по оси Y автомобиля |
| Cym | Перетащите воздух рыскания момент, действующий вокруг фиксированной оси Z автомобиля |
| Af | Фронтальная область |
| R | Удельная атмосферная газовая константа |
| T | Температура воздуха окружающей среды |
| Pabs | Абсолютное давление окружающей среды |
| wx, wy, wz | Скорость ветра вдоль фиксированной оси X -, Y - и Z |
| Wx, Wy, Wz | Скорость ветра по инерционным осям X -, Y - и Z |
Hitch forces - Создайте входной порт силы сцепленияoff (по умолчанию) | onВыберите, чтобы создать вход порт, Fhдля сил заминки.
Hitch moments - Создайте входной порт сцепного моментаoff (по умолчанию) | onВыберите, чтобы создать вход порт, Mhдля заминки моментов.
Vehicle mass, m - Масса2000 (по умолчанию) | scalarМасса транспортного средства, m, в кг.
Longitudinal distance from center of mass to front axle, a - Расстояние от центра масс до передней оси1.4 (по умолчанию) | scalarРасстояние от транспортного средства CM до передней оси, a, в м.
Longitudinal distance from center of mass to middle axle, b - Расстояние от центра масс до средней оси1.6 (по умолчанию) | scalarРасстояние от транспортного средства CM до средней оси, b, в м.
Longitudinal distance from center of mass to rear axle, c - Расстояние от центра масс до задней оси1.8 (по умолчанию) | scalarРасстояние от транспортного средства CM до задней оси, c, в м.
Lateral distance from geometric centerline to center of mass, d - Расстояние от геометрической осевой линии до центра масс0 (по умолчанию) | scalarБоковое расстояние от геометрической осевой линии до СМ, d, в м, вдоль фиксированного для автомобиля y. Положительные значения указывают, что CM транспортного средства находится справа от геометрической осевой линии. Отрицательные значения указывают, что CM транспортного средства находится слева от геометрической осевой линии.
Vertical distance from center of mass to axle plane, h - Расстояние.35 (по умолчанию) | scalarРасстояние по вертикали от CM транспортного средства до плоскости оси, h, в м.
Longitudinal distance from center of mass to hitch, dh - Продольное расстояние от CM до сцепки1 (по умолчанию) | scalarПродольное расстояние от СМ до сцепки, dh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Longitudinal distance from center of mass to hitch, hl - Боковое расстояние от CM до сцепки0 (по умолчанию) | scalarБоковое расстояние от СМ до сцепки, hl, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Vertical distance from hitch to axle plane, hh - Расстояние от сцепки до плоскости оси0.1 (по умолчанию) | scalarРасстояние по вертикали от сцепки до плоскости оси, hh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Initial position in the inertial frame [Xeo,Yeo,Zeo], Xe_o - Начальное положение[0,0,0] (по умолчанию) | vectorНачальное положение транспортного средства в инерционной системе координат, Xeo, в м.
Initial velocity in body axes [xdot_o,ydot_o,zdot_o], xbdot_o - Начальная скорость[0,0,0] (по умолчанию) | vectorНачальная скорость CM транспортного средства вдоль фиксированных x, y - и z-осей, соответственно, в м/с.
Initial Euler orientation [roll, pitch, yaw], eul_o - Начальное вращение Эйлера[0,0,0] (по умолчанию) | vectorНачальное вращение Эйлера неподвижной системы координат автомобиля вокруг фиксированных по земле X - (крен), Y - (тангаж), Z - осей (рыскание), соответственно, в рад.
Initial body rotation rates [p,q,r], p_o - Начальная скорость вращения[0,0,0] (по умолчанию) | vectorНачальная скорость вращения CM транспортного средства относительно фиксированной в транспортном средстве скорости x - (скорость крена), y - (скорость тангажа), z - осей (скорость рыскания), соответственно, в рад/с.
Chassis inertia tensor, Iveh - Инерция[430 0 0; 0 1900 0; 0 0 2100] (по умолчанию) | arrayТензор инерции транспортного средства, Iveh, в кг * м ^ 2. Размерности 3-by-3.
Track widths [front,rear], w - Ширина[1.9,1.9,1.9] (по умолчанию) | vectorПередняя, средняя и задняя ширина дорожки, wf, wm и, wr, соответственно, в м. Размерности 1-by-3.
Mass, z1m - Передняя масса трактора0 (по умолчанию) | scalarМасса, z1m, в кг.
Distance vector from front axle, z1R - Расстояние спереди трактора от передней оси[-.25,.125,.15] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z1R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z1R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z1R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z1R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z1I - Инерция передней части трактора[1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (по умолчанию) | arrayТензор инерции, z1I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z2m - Воздушная масса кабины0 (по умолчанию) | scalarМасса, z2m, в кг.
Distance vector from front axle, z2R - Расстояние между кабиной и передней осью[1.4,0,.8] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z2R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z2R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z2R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z2R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z2I - Инерция верхней части кабины[1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (по умолчанию) | arrayТензор инерции, z2I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z3m - Левая масса системы координат трактора0 (по умолчанию) | scalarМасса, z3m, в кг.
Distance vector from front axle, z3R - Рама трактора на левом расстоянии от передней оси[.75,-.5,.4] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z3R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z3R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z3R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z3R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z3I - Левая инерция системы координат трактора[5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (по умолчанию) | arrayТензор инерции, z3I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z4m - Правая масса системы координат трактора0 (по умолчанию) | scalarМасса, z4m, в кг.
Distance vector from front axle, z4R - Тракторная система координат на правом расстоянии от передней оси[.75,.5,.4] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z4R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z4R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z4R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z4R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z4I - Правая инерция системы координат трактора[5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (по умолчанию) | arrayТензор инерции, z4I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z5m - Масса слева кабины0 (по умолчанию) | scalarМасса, z5м, в кг.
Distance vector from front axle, z5R - Кабина на левом расстоянии от передней оси[1.25,-.5,.4] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z5R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z5R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z5R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z5R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z5I - Левая инерция кабины[5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (по умолчанию) | arrayТензор инерции, z5I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z6m - Правая масса кабины0 (по умолчанию) | scalarМасса, z6m, в кг.
Distance vector from front axle, z6R - Правое расстояние кабины от передней оси[1.25,-.5,.4] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z6R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z6R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z6R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z6R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z6I - Инерция кабины вправо[5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (по умолчанию) | arrayТензор инерции, z6I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Mass, z7m - Задняя масса трактора0 (по умолчанию) | scalarМасса, z7m, в кг.
Distance vector from front axle, z7R - Расстояние задней массы трактора от передней оси[2,0,.25] (по умолчанию) | vectorВектор расстояния от передней оси до нагрузки, z7R, в м. Размерности 1-by-3.
| Элемент массива | Описание |
|---|---|
z7R(1,1) | Передняя точка подвески для нагрузки, вдоль фиксированной оси X автомобиля |
z7R(1,2) | Осевая линия транспортного средства для загрузки вдоль фиксированной по оси Y автомобиля |
z7R(1,3) | Передняя точка подвески для нагрузки, вдоль фиксированной оси Z автомобиля |
Для примера в этой таблице результирующие настройки параметров, которые задают расположение нагрузки.
Расположение примера | Знак |
|---|---|
|
|
Inertia tensor, z7I - Задняя инерция трактора[1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (по умолчанию) | arrayТензор инерции, z7I, в кг· м ^ 2. Размерности 3-by-3.
Тензор использует систему координат с источником в нагрузке CM.
x-ось вдоль фиксированной оси X автомобиля
ось Y вдоль фиксированной оси Y автомобиля
z-ось вдоль фиксированной оси Z автомобиля
Longitudinal drag area, Af - Площадь поперечного сечения транспортного средства2 (по умолчанию) | scalarЭффективная площадь поперечного сечения транспортного средства, Af для вычисления аэродинамической силы сопротивления автомобилю, в м ^ 2.
Longitudinal drag coefficient, Cd - Коэффициент сопротивления воздуха.3 (по умолчанию) | scalarКоэффициент сопротивления воздуха, Cd, безразмерный.
Longitudinal lift coefficient, Cl - Коэффициент подъема воздуха.1 (по умолчанию) | scalarКоэффициент подъема воздуха, Cl, безразмерный.
Longitudinal drag pitch moment, Cpm - Перетаскивание тангажа.1 (по умолчанию) | scalarКоэффициент тангажа продольного сопротивления, Cpm, безразмерный.
Relative wind angle vector, beta_w - Угол ветра[0:0.001:0.01] (по умолчанию) | vectorОтносительный вектор угла ветра, βw, в рад.
Side force coefficient vector, Cs - Перетаскивание боковой силы[0:0.01:0.1] (по умолчанию) | vectorКоэффициент боковой силы вектора коэффициент, Cs, безразмерный.
Yaw moment coefficient vector, Cym - Перетаскивание момента рыскания[0:0.001:0.01] (по умолчанию) | vectorКоэффициент рыскания векторный коэффициент, Cym, безразмерный.
Absolute air pressure, Pabs - Давление101325 (по умолчанию) | scalarАбсолютное давление воздуха окружающей среды, Pabs, в Па.
Air temperature, Tair - Температура окружающего воздуха273 (по умолчанию) | scalarТемпература окружающего воздуха, Tair, в К.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g - Сила тяжести9.81 (по умолчанию) | scalarУскорение свободного падения, g, в м/с ^ 2.
Longitudinal velocity tolerance, xdot_tol - Допуск.1 (по умолчанию) | scalarПродольная скорость допуска, xdottol, в м/с.
Блок использует этот параметр, чтобы избежать деления на нули, когда он вычисляет угол скольжения тела, β.
Geometric longitudinal offset from axle plane, longOff - Продольное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль фиксированной оси X, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Geometric lateral offset from center plane, latOff - Поперечное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от центральной плоскости вдоль фиксированной по оси Y, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff - Смещение по вертикали0 (по умолчанию) | scalarШасси транспортного средства, смещенное от плоскости оси вдоль фиксированной оси Z, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Wrap Euler angles, wrapAng - Выборon (по умолчанию) | offОберните углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям рыскания транспортного средства, которые находятся вне интервала, рассмотрите удаление параметра, если вы хотите:
Отслеживайте общее вращение рыскания транспортного средства.
Избегайте разрывов в оценщиках состояния транспортного средства.
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
Vector Concatenate, Matrix Concatenate | Vehicle Body 3DOF Longitudinal | Vehicle Body 6DOF

