Обрезка ограничивающих рамок
Чтение изображения.
I = imread('peppers.png');Задайте ограничительные рамки и метки.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Создайте окно обрезки по центру.
targetSize = [256 256]; win = centerCropWindow2d(size(I),targetSize);
Центрируйте обрезку изображения.
[r,c] = deal(win.YLimits(1):win.YLimits(2),win.XLimits(1):win.XLimits(2)); J = I(r,c,:);
Центрируйте поля подрезки и метки. Коробки, расположенные вне окна обрезки, удаляются.
[bboxB,indices] = bboxcrop(bboxA,win); labelsB = labelsA(indices);
Отображение результатов.
figure I = insertObjectAnnotation(I,'Rectangle',bboxA,labelsA); J = insertObjectAnnotation(J,'Rectangle',bboxB,labelsB); imshowpair(I,J,'montage')

bboxA - Ограничительные рамкиОграничительные прямоугольники, заданные как M -by-4, M -by-5 или M -by-9, нерассчитывают числовую матрицу. M - количество ограничивающих рамок. Каждая строка матрицы определяет ограничивающий прямоугольник как выровненный по оси прямоугольник, поворотный прямоугольник или кубоид. В этой таблице описывается формат для каждого ограничивающего прямоугольника.
| Ограничительный прямоугольник | Описание |
|---|---|
| Выровненный по оси прямоугольник |
Определенный в пикселе координирует как <reservedrangesplaceholder4>-by-4 числовая матрица со строками формы [<reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reservedrangesplaceholder0>], где:
|
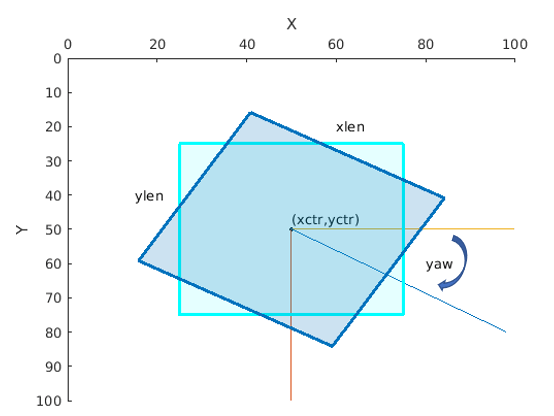
| Повернутый прямоугольник |
Определенный в пространственных координатах как <reservedrangesplaceholder5>-by-5 числовая матрица со строками формы [<<reservedrangesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reserved angesplaceholder0>] , где:
|
| Cuboid |
Определенный в пространственных координатах как <reservedrangesplaceholder9>-by-9 числовая матрица со строками формы [<<reservedrangesplaceholder8> <reservedrangesplaceholder7> <reservedrangesplaceholder6> <reservedrangesplaceholder5> <reserved angesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reservedrangesplace holder0>] , где:
Рисунок показывает, как эти значения определяют положение кубоида.
|
window - Окно обрезкиimages.spatialref.Cuboid | числовое | изображениеОбрезка окна, заданная как вектор с четырьмя элементами или как images.spatialref.Cuboid объект.
Когда вы задаете bboxA в качестве прямоугольного входного параметра окно обрезки должно быть четырехэлементным вектором в формате [x, y, width, height].
Когда вы задаете bboxA как кубоид, окно кадрирования должно быть images.spatialref.Cuboid объект.
threshold - Порог перекрытия1Порог перекрытия, заданная положительная скалярная величина, меньше или равный 1. Количество перекрытия между преобразованными коробками и областью, заданной выходом видом, определяется как:
площадь (bbox пересечения bounding rectangle )/площадь (bbox)
bounding rectangle - Определяется входом пространственной ссылкой объектом, ref.
bbox - Результат преобразования коробок в bboxA.
Если вычисленное значение перекрытия больше, чем значение threshold свойство, затем преобразованные рамки обрезаются до ограничивающей прямоугольной границы. В противном случае коробки сбрасываются. Снижение порога может привести к тому, что части объекта будут сброшены.
bboxerase | bboxresize | bboxwarp | imcrop