Храните видео линии и возвращайте пиксели соседства
Vision HDL Toolbox/Утилиты
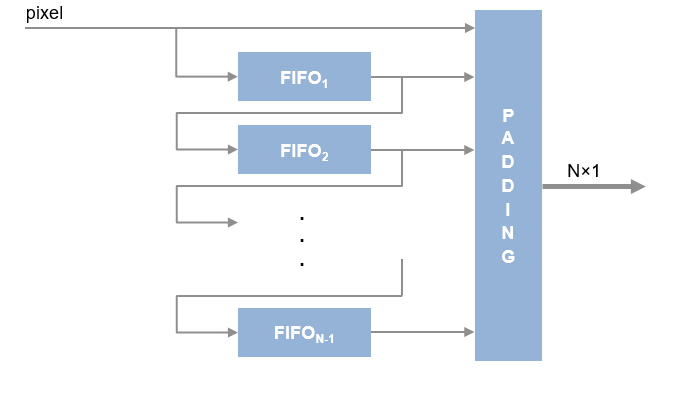
Блок Line Buffer выбирает пиксели окрестностей из потоковых данных изображения. Он обрабатывает сигналы управления видео и заполнения ребер, и конвейеризован для высокоскоростных видео проектов. Блок выводит по одному столбцу окрестности за раз. Чтобы составить район для дальнейшей обработки, используйте сигнал shiftEnable для хранения столбцов выхода, включая заполнение, в регистре сдвига. Этот блок позволяет вам совместно использовать ресурсы буфера линий, когда ваш проект выполняет несколько операций в одном районе.
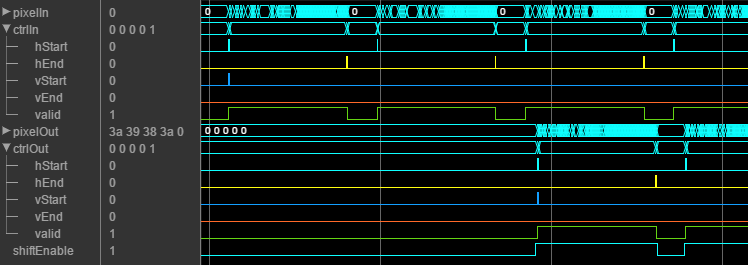
Следующая форма волны показывает блок Line Buffer, возвращающий столбцы 5 на 1 пикселя, которые составляют окрестность 5 на 5. Показанная временная система координат находится в начале (левом верхнем углу) входного кадра. Выход начинается после того, как блок хранит два (floor(M/2)) линии и получает начало третьей линии. Сигнал shiftEnable утверждается на два цикла раньше, чем выход ctrl valid. сигнал, который указывает, что первые два (floor(M/2)) столбцы являются исключительно пикселями заполнения. Точно так же shiftEnable остается высоким в течение двух дополнительных циклов в конце линии.
Этот блок использует интерфейс потокового пикселя с шиной для сигналов управления системой координат. Этот интерфейс позволяет блоку работать независимо от размера и формата изображения. Порты pixel на этом блоке поддерживают потоковую передачу с одним пикселем или многопиксельную потоковую передачу. Потоковая передача с одним пикселем принимает и возвращает одно значение пикселя каждый такт. Мультипиксельная потоковая передача принимает и возвращает 4 или 8 пикселей за тактовый цикл для поддержки форматов с высокой частотой кадров или с высоким разрешением. Вместе с пикселем блок принимает и возвращает pixelcontrol шина, которая содержит пять управляющих сигналов. Сигналы управления указывают валидность каждого пикселя и их местоположение в системе координат. Для многопиксельной потоковой передачи один набор управляющих сигналов применяется ко всем четырем или восьми пикселям в векторе. Чтобы преобразовать систему координат (пиксельную матрицу) в последовательный поток пикселей и сигналы управления, используйте блок Frame To Pixels. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Когда вы используете этот блок в Enabled Subsystem (Simulink), шаблон сигнала включения должен поддерживать синхронизацию потока пикселей, включая минимальные интервалы гашения. Если шаблон enable повреждает синхронизацию потока пикселей, вы можете увидеть частичные выходные системы координат, поврежденные сигналы управления потоком пикселей или несоответствия между Simulink® и результаты симуляции HDL. Вам может потребоваться увеличить интервалы гашения, чтобы соответствовать циклам, когда активация низкая. Дополнительные сведения см. в разделе Настройка интервалов гашения.
Блок хранит M - 1 линию допустимых пикселей, что определяется размером окрестности. Он добавляет биты заполнения на краю системы координат. Блок возвращает первый столбец выхода, как только он может сформировать полный столбец соседства, который происходит в начале входа линии floor(M/2).