Храните видео линии и возвращайте пиксели соседства
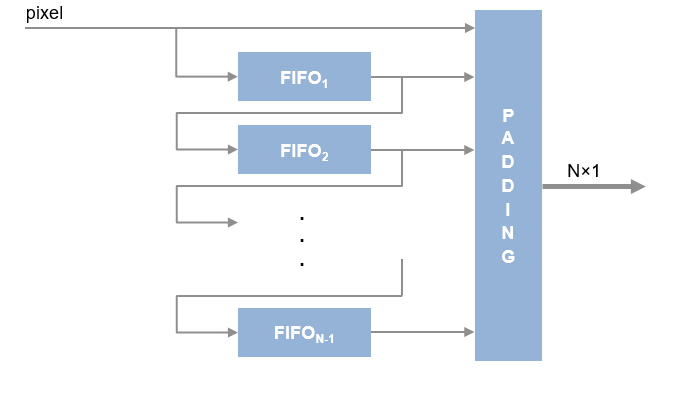
The visionhdl.LineBuffer Системный object™ выбирает пиксели окрестностей из потоковых данных изображения. Он обрабатывает сигналы управления видео и заполнения ребер, и конвейеризован для высокоскоростных видео проектов. Объект выводит по одному столбцу окрестности за раз. Чтобы составить район для дальнейшей обработки, используйте shiftEnable сигнал для хранения выхода столбцов, включая заполнение, в регистре сдвига. Этот объект позволяет вам совместно использовать ресурсы буфера линий, когда ваш проект выполняет несколько операций в одном районе.
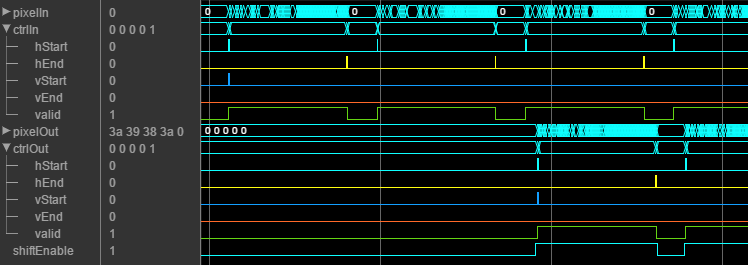
Следующая форма волны показывает visionhdl.LineBuffer объект возвращает столбцы 5 на 1 пикселей, которые составляют район 5 на 5. Показанная временная система координат находится в начале (левом верхнем углу) входного кадра. Выход начинается после того, как объект хранит два (floor(M/2)) линии и получает начало третьей линии. The shiftEnable сигнал утверждается на два цикла раньше, чем выход ctrl.valid сигнал, который указывает, что первые два (floor(M/2)) столбцы являются исключительно пикселями заполнения. Точно так же shiftEnable остается высоким в течение двух дополнительных циклов в конце линии.
Чтобы извлечь районы скользящего пикселя из видеопотока:
Создайте visionhdl.LineBuffer Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
linemem = visionhdl.LineBuffer( возвращает линию буфер Системный объект. Задайте свойства с помощью пар "имя-значение". Заключайте каждое имя свойства в одинарные кавычки. Name,Value)
linemem = visionhdl.LineBuffer('NeighborhoodSize',[5 5])[ возвращает вектор-столбец с пикселями в ядре и сопутствующими управляющими сигналами.pixelOut,ctrlOut,shiftEnable] = lineMem(pixelIn,ctrlIn)
Этот объект использует интерфейс потокового пикселя со структурой для сигналов управления системой координат. Этот интерфейс позволяет объекту работать независимо от размера и формата изображения и соединяться с другими объектами Vision HDL Toolbox™. Объект принимает и возвращает скалярное значение пикселя и сигналы управления как структуру, содержащую пять сигналов. Сигналы управления указывают валидность каждого пикселя и его местоположение в системе координат. Чтобы преобразовать пиксельную матрицу в поток пикселей и сигналы управления, используйте visionhdl.FrameToPixels объект. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
The visionhdl.LineBuffer Системная object™ сохраняет видео линий и возвратов скользящие кварталы для операций с изображениями на основе ядра. Этот пример вычисляет среднее значение каждой окрестности.
Импортируйте источник изображения и настройте объекты сериализатора и десериализатора.
frmOrig = imread('rice.png'); frmActivePixels = 48; frmActiveLines = 32; frmIn = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmIn,'InitialMagnification',300) title 'Input Image' frm2pix = visionhdl.FrameToPixels(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',frmActivePixels,... 'ActiveVideoLines',frmActiveLines,... 'TotalPixelsPerLine',frmActivePixels+10,... 'TotalVideoLines',frmActiveLines+10,... 'StartingActiveLine',6,... 'FrontPorch',5); [~,~,numPixPerFrm] = getparamfromfrm2pix(frm2pix); pix2frm = visionhdl.PixelsToFrame(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',frmActivePixels,... 'ActiveVideoLines',frmActiveLines);

Написание функции, которая создает и вызывает Системный object™. Объект возвращает по одному столбцу окрестности за раз. Используйте регистр сдвига для сохранения столбцов. Затем вычислите среднее значение соседства пикселей. Вы можете сгенерировать HDL из этой функции.
Примечание.Синтаксис объекта выполняется только в R2016b или более поздней версии. Если вы используете более ранний релиз, замените каждый вызов объекта на эквивалентный step синтаксис. Для примера замените myObject(x) с step(myObject,x).
function [pixOut,ctrlOut] = AvgFilter(pixIn,ctrlIn)
%AvgFilter
% Calculates the average pixel value for each 3x3 kernel
% pixIn and pixOut are scalar uint8 pixel values.
% ctrlIn and ctrlOut are structures that contain control signals associated
% with the pixel.
% You can generate HDL code from this function.
persistent linemem;
if isempty(linemem)
linemem = visionhdl.LineBuffer;
end
persistent dataShiftReg;
if isempty(dataShiftReg)
% use typeof(pixIn)?
dataShiftReg = fi(zeros(3,3),0,8,0);
end
% HDL code gen does not support arrays of structs
persistent controlShiftReg1;
persistent controlShiftReg2;
persistent controlShiftReg3;
if isempty(controlShiftReg1)
controlShiftReg1 = pixelcontrolstruct();
controlShiftReg2 = pixelcontrolstruct();
controlShiftReg3 = pixelcontrolstruct();
end
persistent div9;
if isempty(div9)
div9 = fi(1/9,0,12,15);
end
% Advance shift registers
dataShiftReg(:,2:end) = dataShiftReg(:,1:end-1);
controlShiftReg3 = controlShiftReg2;
controlShiftReg2 = controlShiftReg1;
% Fetch next column
[dataShiftReg(:,1),controlShiftReg1] = linemem(fi(pixIn,0,8,0),ctrlIn);
% Calculate the average over the neighborhood
pixOut = uint8((sum(dataShiftReg(:),'native')).*div9);
ctrlOut = controlShiftReg3;
end
Обработайте изображение, вызвав функцию для каждого пикселя.
pixOutVec = ones(numPixPerFrm,1,'uint8'); ctrlOutVec = repmat(pixelcontrolstruct(false,false,false,false,false),numPixPerFrm,1); [pixInVec,ctrlInVec] = frm2pix(frmIn); for p = 1:numPixPerFrm [pixOutVec(p),ctrlOutVec(p)] = AvgFilter(pixInVec(p),ctrlInVec(p)); end
Воссоздайте отфильтрованную систему координат.
[frmOut,frmValid] = step(pix2frm,pixOutVec,ctrlOutVec); if frmValid figure; imshow(frmOut,'InitialMagnification',300) title 'Output Image' end

Объект хранит M - 1 линию допустимых пикселей, что определяется размером окрестности. Он добавляет биты заполнения на краю системы координат. Объект возвращает первый столбец выхода, как только он может сформировать полный столбец соседства, который происходит в начале входа линии floor(M/2).