2-D медианную фильтрацию
Vision HDL Toolbox/Анализ и совершенствование
Vision HDL Toolbox/Фильтрация
Блок Median Filter заменяет каждый входной пиксель медианным значением заданного окружающего N окрестности N by. Медиана менее чувствительна к экстремальным значениям, чем среднее. Можно использовать этот блок для удаления соляно-перцового шума с изображения без существенного снижения резкости изображения. Можно задать размер окрестности и значения заполнения для ребер входного изображения.
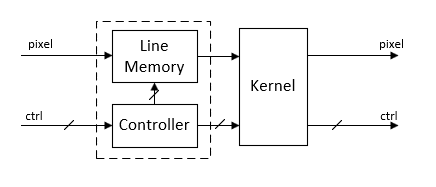
Этот блок использует интерфейс потокового пикселя с шиной для сигналов управления системой координат. Этот интерфейс позволяет блоку работать независимо от размера и формата изображения. Порты pixel на этом блоке поддерживают потоковую передачу с одним пикселем или многопиксельную потоковую передачу. Потоковая передача с одним пикселем принимает и возвращает одно значение пикселя каждый такт. Мультипиксельная потоковая передача принимает и возвращает 4 или 8 пикселей за тактовый цикл для поддержки форматов с высокой частотой кадров или с высоким разрешением. Вместе с пикселем блок принимает и возвращает pixelcontrol шина, которая содержит пять управляющих сигналов. Сигналы управления указывают валидность каждого пикселя и их местоположение в системе координат. Для многопиксельной потоковой передачи один набор управляющих сигналов применяется ко всем четырем или восьми пикселям в векторе. Чтобы преобразовать систему координат (пиксельную матрицу) в последовательный поток пикселей и сигналы управления, используйте блок Frame To Pixels. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Когда вы используете блок с внутренним буфером линии внутри Enabled Subsystem (Simulink), шаблон сигнала включения должен поддерживать синхронизацию потока пикселей, включая минимальные интервалы гашения. Если шаблон enable повреждает синхронизацию потока пикселей, вы можете увидеть частичные выходные системы координат, поврежденные сигналы управления потоком пикселей или несоответствия между Simulink® и результаты симуляции HDL. Вам может потребоваться увеличить интервалы гашения, чтобы соответствовать циклам, когда активация низкая. Дополнительные сведения см. в разделе Настройка интервалов гашения.
Когда вы используете мультипиксельную потоковую передачу, блок использует одну линейную память и реализует NumberOfPixels ядра фильтров параллельно. Это увеличение аппаратных ресурсов является компромиссом для увеличения пропускной способности по сравнению с однопиксельной потоковой передачей.
Задержка блока - это задержка буфера линий плюс задержка вычисления ядра. Задержка буфера линии включает заполнение ребра по умолчанию. Задержка операции заполнения зависит от размера ядра. Если заполнение ребра не обязательно для вашего проекта, можно уменьшить задержку, установив параметр Padding method равным None. Когда вы используете эту опцию, задержка блока не зависит от размера вашего ядра. Чтобы определить точную задержку для любого строения блока, измерьте количество временных шагов между входом и выходным сигналами управления.
Чтобы найти медианное значение каждой окрестности, логика ядра сравнивает значения пикселей друг с другом. Задержка ядра фильтра зависит от размера окрестности. Таблица показывает количество сравнений, необходимых для нахождения медианного значения каждого размера окрестности.
| Neighborhood Size | Количество проведенных сравнений |
|---|---|
3× <reservedrangesplaceholder0> | 11 |
5× <reservedrangesplaceholder0> | 75 |
7× <reservedrangesplaceholder0> | 230 |
Примечание
Когда вы используете ребро, используйте горизонтальный интервал гашения, больше, чем в два раза ширина ядра. Этот интервал позволяет блоку закончить обработку одной линии до начала обработки следующей, включая добавление пикселей заполнения до и после активных пикселей в линии. Стандартные форматы потокового видео используют горизонтальный интервал гашения, составляющий около 25% ширины системы координат. Этот интервал намного больше, чем фильтры, примененные к каждой системе координат. Когда вы отключаете заполнение ребра, горизонтальный интервал гашения должен быть не менее 12 циклов и не зависит от размера ядра. Если вы используете пользовательский формат видео, установите горизонтальный интервал гашения при помощи Frame To Pixels параметров блоков. Горизонтальный интервал гашения равен Total pixels per line - Active pixels per line или, эквивалентно, Front porch + Back porch. Дополнительные сведения см. в разделе Настройка интервалов гашения.
Frame To Pixels | visionhdl.MedianFilter | Median Filter (Computer Vision Toolbox)

