Добавьте парковку в ведущий сценарий
parkingLot( задает дополнительные опции с помощью аргументов name-value. Например, задать парковочное место раньше заполняло одно из предопределенных размещений парковки, использовало scenario,vertices,Name=Value)ParkingSpace аргумент значения имени.
lot = parkingLot(___)ParkingLot объект, lot, это хранит свойства созданной парковки. Чтобы вставить парковочные места в эту парковку, задайте lot как входной параметр insertParkingSpaces функция. Можно возвратить lot использование любого из предыдущих синтаксисов.
Создайте ведущий сценарий, содержащий короткую дорогу, которая вводит в парковку, которая 50 метров длиной и 20 метров шириной. Постройте парковку и отобразите числа ребра, вдоль которых можно вставить парковочные места. Поскольку ребро 3 формы перекресток с дорогой, ее номер ребра не отображается на графике, но можно все еще вставить пробелы вдоль него.
scenario = drivingScenario;
roadcenters = [25 30; 25 15];
road(scenario,roadcenters);
vertices = [0 0; 50 0; 50 20; 0 20];
lot = parkingLot(scenario,vertices);
plot(scenario,ParkingLotEdges="On")
Задайте тип парковочного места, чтобы добавить вдоль одного из ребер. Установите угол 60 градусов. Постройте парковочное место.
space = parkingSpace(Angle=60); plot(space)

Вставьте угловые пробелы вдоль ребра 1 из парковки.
insertParkingSpaces(lot,space,Edge=1)

Вставьте повернутые пробелы вдоль ребра 3: пять выше соединения и пять ниже соединения. Возместите эти пробелы на 3 метра и в 30 метрах от нижней части ребра 3, соответственно. Инвертируйте угол пробелов, используемых вдоль ребра 1.
numSpaces = 5; space = parkingSpace(Angle=120); insertParkingSpaces(lot,space,numSpaces,Edge=3,Offset=3) insertParkingSpaces(lot,space,numSpaces,Edge=3,Offset=30)

Исследуйте различные парковки, которые можно создать при помощи предопределенных размещений, а также опций для конфигурирования тех размещений.
Задайте парковочное место, используемое, чтобы заполнить парковку. Измените ширину, длину или угол пробела и ширины и силы ее маркировок маршрута. Постройте парковочное место.
width =2.6; % m длина =
5.5; % m угол =
90; % deg markingWidth =
0.15; markingStrength =
1; пробел = parkingSpace (Width=width, ... Length=length, ... Angle=angle, ... MarkingWidth=markingWidth, ... MarkingStrength=markingStrength); постройте (пробел)

Создайте ведущий сценарий, содержащий 50 50 парковка метра. Задайте предопределенное размещение парковки и минимальную ведущую ширину маршрута. Сгенерированная парковка заполняет с как можно большим количеством парковочных мест, которые соответствуют размещению, учитывая минимальное ведущее ограничение ширины маршрута. Измените парковочное место, тип макета и ведущую ширину маршрута, и наблюдайте эффекты на парковке. Например:
Когда вы увеличиваете размер парковочного места или минимальной ведущей ширины маршрута, количества парковки сеток, которые соответствуют посреди уменьшений парковки.
Если вы выбираете HorizontalWithEdges или VerticalWithEdges размещение, одно ребро имеет меньше пробелов, чем другие. Это ребро содержит ведущий маршрут ширины DrivingLaneWidth это позволяет транспортным средствам ввести парковку.
scenario = drivingScenario; vertices = [0 0; 50 0; 50 -50; 0 -50]; parkingLayout ="Vertical"; drivingLaneWidth =
2.6; % m parkingLot (сценарий, вершины, ... ParkingSpace=space, ... ParkingLayout=parkingLayout, ... DrivingLaneWidth=drivingLaneWidth); постройте (сценарий)

Создайте ведущий сценарий, содержащий 50-метровую дорогу и 20 30 парковка метра. Постройте сценарий.
scenario = drivingScenario; roadcenters = [0 50; 50 0]; road(scenario,roadcenters); vertices = [40 10; 25 -5; 5 15; 20 30]; lot = parkingLot(scenario,vertices); plot(scenario)

Вставьте сетку парковки в партию. Задайте сетку с двумя строками восьми пробелов. Используйте размерности парковочного места по умолчанию и поместите сетку в углу в 45 градусов, чтобы выровнять ее с дорогой.
space = parkingSpace; numSpaces = 8; insertParkingSpaces(lot,space,numSpaces,Rows=2,Position=[15 20],Orientation=45)

Создайте парковку, которая содержит смесь парковочных мест, областей без парковок и доступных пробелов.
Задайте парковочное место, чтобы использовать на парковке. Используйте настройки по умолчанию. Постройте пробел.
space = parkingSpace;
plot(space,Origin="off")
Задайте области без парковок, чтобы использовать на парковке. Задайте цвет белого и ширины, которая составляет один метр меньше, чем ширина парковочного места по умолчанию. Постройте пробел.
noSpace = parkingSpace(Type="NoParking",Width=(space.Width - 1),MarkingColor="White"); plot(noSpace,Origin="off")

Задайте доступное парковочное место, чтобы использовать на парковке. Задайте ширину, которая составляет один метр больше, чем ширина парковочного места по умолчанию. Постройте пробел.
accessibleSpace = parkingSpace(Type="Accessible",Width=(space.Width + 1)); plot(accessibleSpace,Origin="off")

Создайте ведущий сценарий, содержащий парковку с непрямоугольным размещением. Постройте парковку и отобразите числа ребра, вдоль которых можно добавить парковочные места.
scenario = drivingScenario;
vertices = [0 0; 32 -10.5; 32 -50.5; 25 -57.5; 0 -57.5];
lot = parkingLot(scenario,vertices);
plot(scenario,ParkingLotEdges="on")
Вставьте парковочные места по умолчанию вдоль первых трех ребер парковки. Чтобы постараться не перекрывать парковочные места, внесите эти корректировки во вставки:
Вдоль ребра 1, вставьте только 10 пробелов.
Вдоль ребра 2, возмещает пробелы на 5 метров от первой вершины ребра.
Вдоль ребра 3, возмещает пробелы на 3 метра от первой вершины ребра.
numSpaces = 10; insertParkingSpaces(lot,space,numSpaces,Edge=1) insertParkingSpaces(lot,space,Edge=2,Offset=5) insertParkingSpaces(lot,space,Edge=3,Offset=3)

В центре парковки вставьте 2 10 сетка парковочных мест, содержащих 8 столбцов пробелов по умолчанию, 1 столбец областей без парковок и 1 столбец доступных пробелов.
insertParkingSpaces(lot,[space noSpace accessibleSpace],[8 1 1],Position=[12 -18],Rows=2)

Симулируйте ведущий сценарий, в котором автомобиль управляет наоборот, чтобы отступить в парковочное место.
Создайте ведущий сценарий, содержащий парковку.
scenario = drivingScenario; vertices = [0 9; 18 9; 18 -9; 0 -9]; parkingLot(scenario,vertices,ParkingSpace=parkingSpace);
Создайте автомобиль и задайте его траекторию. Автомобильные диски вперед, остановки, и затем управляют наоборот, чтобы отступить в парковочное место. Когда автомобиль вводит парковочное место, он имеет угол ориентации рыскания, который является 90 градусами против часовой стрелки от того, где он запустился.
car = vehicle(scenario,ClassID=1); waypoints = [9 -5; 9 5; 6 -1.3; 2 -1.3]; speed = [3; 0; -2; 0]; yaw = [90 90 180 180]; smoothTrajectory(car,waypoints,speed,Yaw=yaw)
Постройте ведущий сценарий и отобразите waypoints траектории.
plot(scenario,Waypoints="on") while advance(scenario) pause(0.001) end

Сгенерируйте обнаружения автомобилей, припаркованных на парковке, и постройте обнаружения на видимом с большого расстояния графике.
Создайте ведущий сценарий, содержащий дорожную и парковку.
scenario = drivingScenario; roadcenters = [10 40; 10 -40]; road(scenario,roadcenters); vertices = [0 20; 20 20; 20 -20; 0 -20]; parkingLot(scenario,vertices,ParkingSpace=parkingSpace);
Добавьте автомобиль, оборудованный датчиком и задайте траекторию, в которой транспортное средство проезжает парковка.
ego = vehicle(scenario);
waypoints = [10 35 0; 10 10 0];
speed = 5; % m/s
smoothTrajectory(ego,waypoints,speed)
Создайте припаркованные автомобили на нескольких парковочных местах. Постройте сценарий.
parkedCar1 = vehicle(scenario,Position=[15.8 12.4 0]); parkedCar2 = vehicle(scenario,Position=[15.8 -12.4 0]); parkedCar3 = vehicle(scenario,Position=[2 -9.7 0]); parkedCar4 = vehicle(scenario,Position=[2 9.7 0]); plot(scenario)

Создайте датчик видения для генерации обнаружений. По умолчанию датчик смонтирован к переднему бамперу автомобиля, оборудованного датчиком.
sensor = visionDetectionGenerator;
Создайте видимый с большого расстояния график и плоттеры для визуализации целевых основ, дорожных контуров, паркуя маркировки маршрута, зону охвата датчика и обнаружения. Затем симулируйте сценарий и сгенерируйте обнаружения.
bep = birdsEyePlot(XLim=[-40 40],YLim=[-30 30]); olPlotter = outlinePlotter(bep); lbPlotter = laneBoundaryPlotter(bep); lmPlotter = laneMarkingPlotter(bep,DisplayName="Parking lanes"); caPlotter = coverageAreaPlotter(bep,DisplayName="Coverage area"); detPlotter = detectionPlotter(bep,DisplayName="Detections"); while advance(scenario) % Plot target outlines. [position,yaw,length,width,originOffset,color] = targetOutlines(ego); plotOutline(olPlotter,position,yaw,length,width) % Plot lane boundaries of ego vehicle. rbEgo = roadBoundaries(ego); plotLaneBoundary(lbPlotter,rbEgo) % Plot parking lane markings. [plmv,plmf] = parkingLaneMarkingVertices(ego); plotParkingLaneMarking(lmPlotter,plmv,plmf) % Plot sensor coverage area. mountPosition = sensor.SensorLocation; range = sensor.MaxRange; orientation = sensor.Yaw; fieldOfView = sensor.FieldOfView(1); plotCoverageArea(caPlotter,mountPosition,range,orientation,fieldOfView) % Generate and plot detections. actors = targetPoses(ego); time = scenario.SimulationTime; [dets,isValidTime] = sensor(actors,time); if isValidTime positions = cell2mat(cellfun(@(x)([x.Measurement(1) x.Measurement(2)]), ... dets,UniformOutput=false)); plotDetection(detPlotter,positions) end end


scenario — Ведущий сценарийdrivingScenario объектВедущий сценарий в виде drivingScenario объект.
vertices — Вершины парковкиВершины парковки в виде N-by-2 или N-by-3 матрица с действительным знаком. N является количеством вершин, и каждый из сегментов N - 1 между вершинами задает ребро парковки. N должен быть больше или быть равен 3.
Если vertices N-by-2 матрица, затем каждая строка матрицы представляет (x, y) координата вершины. Z-координатой каждой вершины является 0.
Если vertices N-by-3 матрица, затем каждая строка матрицы представляет (x, y, z) координата вершины.
Вершины находятся в системе мировой координаты ведущего сценария.
Этот аргумент устанавливает Vertices свойство парковки. Просмотреть свойства парковки, любой доступ ParkingLots свойство scenario, или возвратите парковку путем определения lot выходной аргумент.
Пример: [0 0; 0 20; 20 20; 20 0]
Пример: [0 0 0; 0 20 5; 20 20 5; 20 0 0]
Задайте дополнительные пары аргументов как Name1=Value1,...,NameN=ValueN, где Name имя аргумента и Value соответствующее значение. Аргументы name-value должны появиться после других аргументов, но порядок пар не имеет значения.
ParkingSpace=parkingSpace,ParkingLayout="Horizontal" заполняет парковку с парковочным местом по умолчанию в горизонтальном макете.ParkingSpace — Парковочное местоparkingSpace объектПарковочное место раньше заполняло парковку в виде parkingSpace объект. Задавать тип размещения раньше заполняло парковку с пробелами, использовало ParkingLayout аргумент значения имени.
Можно задать ParkingSpace только для прямоугольных парковок. Чтобы добавить парковочные места в непрямоугольные парковки, используйте insertParkingSpaces функция.
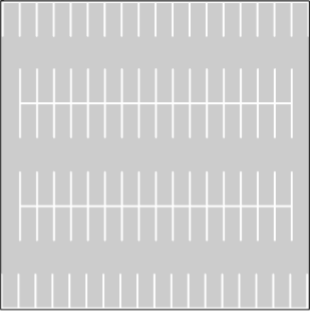
ParkingLayout — Размещение парковки"Vertical" (значение по умолчанию) |
"Horizontal" | "VerticalWithEdges" | "HorizontalWithEdges"Размещение парковки в виде "Vertical", "Horizontal", "VerticalWithEdges", или "HorizontalWithEdges".
Чтобы использовать этот аргумент, необходимо задать ParkingSpace аргумент значения имени. parkingLot функция добавляет как много пробелов пробела ParkingSpace та подгонка размещение как возможное, учитывая минимальную ведущую ширину задано DrivingLaneWidth.
Эта таблица описывает ParkingLayout опции.
| Опция | Описание |
|---|---|
"Vertical" | Разметьте парковочные места сверху донизу.
|
"Horizontal" | Разметьте парковочные места слева направо.
|
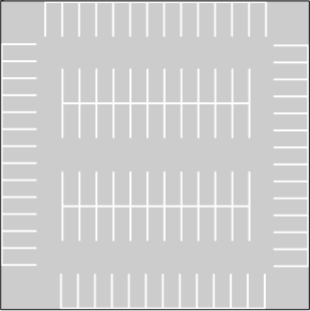
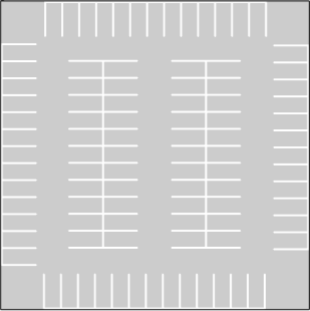
"VerticalWithEdges" | Разметьте парковочные места сверху донизу и также вставьте парковочные места вдоль левых и правых ребер. Чтобы позволить транспортным средствам ввести парковку, базовый край содержит ведущий маршрут с шириной
|
"HorizontalWithEdges" | Разметьте парковочные места слева направо и также вставьте парковочные места вдоль верхних и нижних ребер. Чтобы позволить транспортным средствам ввести парковку, правый край содержит ведущий маршрут с шириной
|
Типы данных: char | string
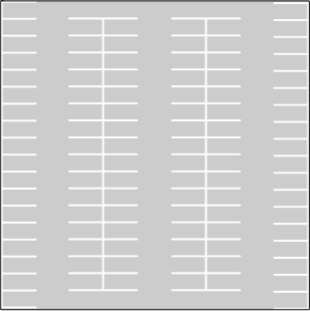
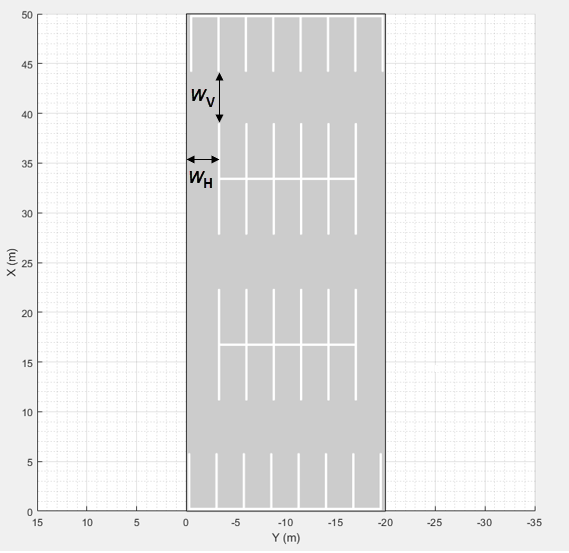
DrivingLaneWidth — Минимальная ширина ведущих маршрутов (m)Минимальная ширина ведущих маршрутов на парковке, на метрах в виде действительного скаляра в области значений [0, 50]. Чтобы использовать этот аргумент, необходимо задать ParkingSpace аргумент значения имени. parkingLot функционируйте использует DrivingLaneWidth определить сумму пробела, чтобы добавить по обе стороны от сеток парковки. По умолчанию, DrivingLaneWidth равно ширине пробела, заданного ParkingSpace.
Чтобы осуществить симметричное расположение сеток парковки, фактическая ширина ведущих маршрутов может быть больше DrivingLaneWidth. Например, на этой парковке, горизонтальная ширина, W H, равна DrivingLaneWidth, но вертикальная ширина, W V, немного больше DrivingLaneWidth. Дополнительная вертикальная ширина включает ровное распределение сеток парковки в партии вдоль вертикальной оси
Name — Имя парковки'' (значение по умолчанию) | вектор символов | строковый скалярИмпорт данных о парковке из внешних источников при помощи roadNetwork функция не поддерживается.
Импорт парковок в приложение Driving Scenario Designer не поддерживается. Если вы открываете сценарий, содержащий парковку в приложении, приложение не использует парковку из сценария.
Импорт парковок в Simulink® не поддерживается. Если вы читаете сценарий, содержащий парковку в Simulink при помощи блока Scenario Reader, блок не использует парковку из модели Simulink.
Обнаружения датчика парковки маркировок маршрута не поддерживаются. Однако можно визуализировать маркировки маршрута парковки на birdsEyePlot объект при помощи plotParkingLaneMarking функция.
parkingSpace | insertParkingSpaces | plotParkingLaneMarking | parkingLaneMarkingVertices | drivingScenario | road