Механизм механизма, который позволяет управляемым валам вращаться на различных скоростях
Simscape / Автомобильная трансмиссия / Механизмы

Блок Differential представляет механизм механизма, который позволяет управляемым валам вращаться на различных скоростях. Дифференциалы распространены в автомобилях, где они позволяют различным колесам вращаться на различных скоростях при движении на повороте. Порты D, S1 и S2 представляют продольный карданный вал и валы механизма солнца дифференциала, соответственно. Любой из валов может управлять другими двумя.
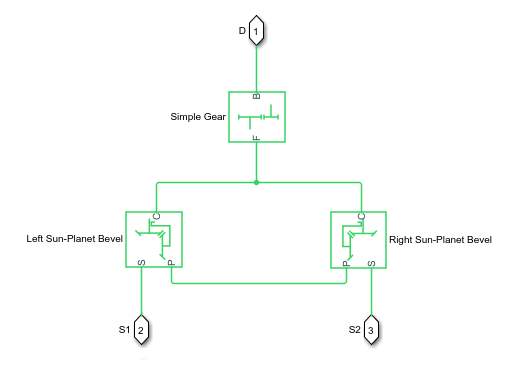
Блок моделирует дифференциальный механизм как структурное компонентно-ориентированное на Simple Gear и блоках Simscape™ Driveline™ Sun-Planet Bevel. Фигура демонстрирует эквивалентную блок-схему для блока Differential.
Чтобы увеличить точность модели механизма, задайте свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты, чтобы быть незначительными. Блок позволяет вам задать инерцию несущей механизма и внутренних механизмов планеты. Чтобы смоделировать инерцию внешних механизмов, соедините Simscape блоки Inertia с портами D, S1 и S2.
Можно смоделировать эффекты теплового потока и изменения температуры путем включения дополнительного теплового порта. Чтобы включить порт, установите Friction model на Temperature-dependent efficiency.
Дифференциал налагает одно кинематическое ограничение на три связанных оси, такие что
где:
ωS1 является скоростью вала механизма солнца 1.
ωS2 является скоростью вала механизма солнца 2.
Отрицательные величины подразумевают, что дифференциал оставляют средней линии. Эти три степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1,2) = (S, S) и (C, D). C является несущей.
Сумма боковых движений является преобразованным продольным движением. Различие движений стороны, , независимо от продольного движения. Общее движение боковых валов является суперпозицией этих двух независимых степеней свободы, которые имеют это физическое значение:
Продольная степень свободы эквивалентна двум боковым валам, вращающимся при той же скорости вращения, , и в фиксированном отношении относительно продольного вала.
Дифференциальная степень свободы эквивалентна хранению продольного ведущего заблокированного вала, , где ωD является скоростью ведущего вала, в то время как боковые валы вращаются друг относительно друга в противоположных направлениях, .
Боковые крутящие моменты оси ограничиваются продольным крутящим моментом оси, таким образом, что сетевой поток энергии суммирует, чтобы обнулить:
где:
τS1 и τS2 являются крутящими моментами вдоль боковых осей.
τD является продольным крутящим моментом.
Ploss является потерями мощности.
Когда кинематические ограничения и ограничения степени объединены, идеальные выражения случая
где gD является передаточным отношением для продольного карданного вала.
Эффективное ограничение блока Differential состоит из двух подограничений механизма скоса планеты солнца.
Первое подограничение происходит из-за связи двух скосов планеты солнца, связывает с несущей:
где gSP1 и gSP2 являются передаточными отношениями для механизмов планеты солнца.
Второе подограничение происходит из-за связи несущей к продольному карданному валу:
Передаточные отношения планеты солнца базовых механизмов скоса планеты солнца, в терминах радиусов, r, механизмов планеты солнца:
Блок Differential реализован с , отъезд gD, свободного настраивать.
В неидеальном случае, τloss ≠ 0. Для получения дополнительной информации смотрите Механизмы Модели с Потерями.
Механизмы приняты, чтобы быть твердыми.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации смотрите, Настраивают Точность Модели.
Disk Friction Clutch | Simple Gear | Sun-Planet Bevel
