Соединение, которое осуществляет постоянную скорость кинематическое ограничение между двумя валами
Simscape / Мультитело / Соединения

Блок Constant Velocity Joint осуществляет постоянную скорость (CV) кинематическое ограничение между его базой и последующей системой координат, источники которой являются совпадающими в течение симуляции. А именно, если Z - оси базы и последующей системы координат оба фиксируются относительно системы координат общей ссылки, Z - компоненты скоростей вращения этих двух систем координат относительно системы координат общей ссылки равны.
Блок имеет две степени свободы, которые позволяют Z - оси базы и последующей системы координат быть произвольно ориентированным друг относительно друга. Рисунок показывает пример.
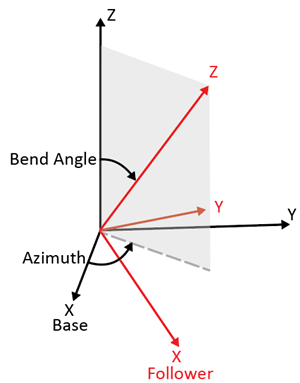
Черные и красные системы координат указывают на базу и последующую систему координат блока. Вращение азимута вокруг Z - ось базовой системы координат определяет местоположение плоскости, в которой происходит угол поворота. Угол поворота о получившемся Y - оси, красном Y - ось, задает ориентацию Z - оси системы координат последователя относительно Z - ось базовой системы координат.
Блок имеет две параметризации, Rotation Sequence (faster simulation) или Quaternion (allows zero bend angle), задавать внутренние состояния соединения. Используйте параметризацию последовательности вращения каждый раз, когда возможный, потому что симуляция с этой параметризацией обычно быстрее, чем симуляция с параметризацией кватерниона. Смотрите Внутреннее состояние для получения дополнительной информации.
Можно задать желаемые начальные состояния соединения параметрами под State Targets, такими как положение и скорость азимута и изогнуть угол.
Блок имеет множество распознающихся способностей. Можно обнаружить азимут, угол поворота и их производные времени в течение симуляции. Кроме того, можно обнаружить силы и крутящие моменты, которые действуют в соединении, таком как ограничительные силы и общий крутящий момент. Смотрите, что Составная Сила/Крутящий момент Распознается для получения дополнительной информации.
B — Базовая система координатПорт сопоставлен с базовой системой координат блока соединений. В типовых приложениях, где соединение CV связывает два вала, Z - ось базовой системы координат выравнивается с ведущим валом.
F — Система координат последователяПорт сопоставлен с системой координат последователя блока соединений. В типовых приложениях, где соединение CV связывает два вала, Z - ось системы координат последователя выравнивается с управляемым валом.
mode — Входной сигнал, управляющий объединенным режимомВходной сигнал, который управляет объединенным режимом в виде безразмерного скаляра. Объединенный режим нормален, когда входной сигнал 0 и расцеплен, когда входной сигнал-1. Объединенный режим может изменяться много раз во время симуляции.
Чтобы включить этот порт, под Mode Configuration, устанавливают Mode на Provided by Input.
qb — Изогните уголИзогните угол соединения CV, возвращенного как скаляр. Это количество является углом между Z - оси базы и последующей системы координат блока.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Bend Angle, выбирают Position.
wb — Скорость угла поворотаСкорость угла поворота соединения CV, возвращенного как скаляр. Это количество равняется производной времени выхода сигнала от порта qb.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Bend Angle, выбирают Velocity.
bb — Ускорение угла поворотаУскорение угла поворота соединения CV, возвращенного как скаляр. Это количество равняется производной второго раза выхода сигнала от порта qb.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Bend Angle, выбирают Acceleration.
qa — АзимутАзимут соединения CV, возвращенного как скаляр. Это количество является углом вращения вокруг Z - ось базовой системы координат. Вращение определяет местоположение плоскости, в которой происходит угол поворота.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Azimuth, выбирают Position.
wa — Скорость азимутаСкорость азимута соединения CV, возвращенного как скаляр. Это количество равняется производной времени выхода сигнала от порта qa.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Azimuth, выбирают Velocity.
ba — Ускорение азимутаУскорение азимута соединения CV, возвращенного как скаляр. Это количество равняется производной второго раза выхода сигнала от порта qa.
Чтобы включить этот порт, под Constant Velocity Primitive (CV)> Sensing> Azimuth, выбирают Acceleration.
fc — Ограничительная силаОграничительная сила, которая действует в соединении, возвратилась как скаляр. Сила обеспечивает поступательные ограничения соединения. Смотрите Ограничительные Силы Смысла для получения дополнительной информации.
Чтобы включить этот порт, под Composite Force/Torque Sensing, выбирают Constraint Force.
tc — Ограничительный крутящий моментОграничительный крутящий момент, действующий в соединении, возвращенном как скаляр. Крутящий момент обеспечивает вращательные ограничения соединения. Смотрите Силу и Крутящий момент, Распознающийся для получения дополнительной информации.
Чтобы включить этот порт, под Composite Force/Torque Sensing, выбирают Constraint Torque.
ft — Общая силаОбщая сила, действующая в соединении, возвращенном как скаляр. Общая сила является суммой сил, переданных от одной системы координат до другого через соединение. Сила включает приведение в действие, внутреннее, и ограничительные силы. Смотрите Силу и Крутящий момент, Распознающийся для получения дополнительной информации.
Чтобы включить этот порт, под Composite Force/Torque Sensing, выбирают Total Force.
tt — Общий крутящий моментОбщий крутящий момент, действующий в соединении, возвращенном как скаляр. Общий крутящий момент является суммой крутящих моментов, переданных от одной системы координат до другого через соединение. Крутящий момент включает приведение в действие, внутреннее, и ограничительные крутящие моменты. Смотрите Силу и Крутящий момент, Распознающийся для получения дополнительной информации.
Чтобы включить этот порт, под Composite Force/Torque Sensing, выбирают Total Torque.
Internal State — Параметризация внутреннего состояния соединенияRotation Sequence (faster simulations) (значение по умолчанию) | Quaternion (allows zero bend angle)Выберите параметризацию, чтобы задать внутренние состояния соединения.
Rotation Sequence (faster simulations)Блок Constant Velocity Joint использует параметризацию последовательности вращения Z-Y-Z. Угол второго Z - вращение оси является отрицанием угла первого Z - вращение оси.
Используйте этот метод каждый раз, когда возможный, потому что симуляция с этой параметризацией обычно быстрее, чем симуляция с параметризацией кватерниона. Однако параметризация последовательности вращения Z-Y-Z имеет кинематическую сингулярность, когда угол поворота является нулем. Если нулевой угол поворота требуется, установите Internal State на Quaternion (allows zero bend angle).
Quaternion (allows zero bend angle)Блок Constant Velocity Joint использует параметризацию кватерниона. Чтобы осуществить CV кинематическое ограничение, четвертый компонент кватерниона, Z - компонент векторной части, всегда является нулем.
Используйте этот метод, когда нулевой угол поворота будет требоваться. Этот метод не имеет кинематической сингулярности под нулевым углом поворота, но имеет кинематическую сингулярность, когда угол поворота является 180 градусами. Симуляция с этой параметризацией обычно медленнее, чем симуляция с параметризацией Z-Y-Z.
State Targets > Specify Position Target — Задать ли цель положенияoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить параметры для определения цели положения соединения.
State Targets > Specify Position Target > Priority — Приоритетный уровень цели положенияHigh (desired) (значение по умолчанию) | Low (approximate)Установите приоритетный уровень цели положения. Смотрите Направляющий блок для получения дополнительной информации.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Position Target.
State Targets > Specify Position Target > Value — Углы, чтобы задать цель положенияBend Angle Only (значение по умолчанию) | Bend Angle and AzimuthУказать ли, что цель положения CV соединяется в начале симуляции с помощью только угол поворота или угол поворота и азимут.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Position Target.
State Targets > Specify Position Target > Value > Bend Angle — Изогните угол, чтобы задатьdeg (значение по умолчанию)Задайте угол поворота соединения CV.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Position Target.
State Targets > Specify Position Target > Value > Azimuth — Азимут, чтобы задатьdeg (значение по умолчанию)Задайте азимут соединения CV.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets> Specify Position Target> Value, выбирают Bend Angle and Azimuth.
State Targets > Specify Velocity Target — Задать ли скоростную цельoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить параметры для определения скоростной цели соединения.
State Targets > Specify Velocity Target > Priority — Приоритетный уровень скоростной целиHigh (desired) (значение по умолчанию) | Low (approximate)Установите приоритетный уровень скоростной цели. Смотрите Направляющий блок для получения дополнительной информации.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Velocity Target.
State Targets > Specify Velocity Target > Value — Параметры, чтобы задать скоростную цельBend Angle Only (значение по умолчанию) | Bend Angle and AzimuthУказать ли, что скоростная цель CV соединяется в начале симуляции с помощью только угол поворота или угол поворота и азимут.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Velocity Target.
State Targets > Specify Velocity Target > Value > Bend Angle — Изогните угловую скорость, чтобы задатьdeg/s (значение по умолчанию)Задайте угловую скорость поворота соединения CV.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets, выбирают Specify Velocity Target.
State Targets > Specify Velocity Target > Value > Azimuth — Скорость азимута, чтобы задатьdeg/s (значение по умолчанию)Задайте скорость азимута соединения CV.
Чтобы включить этот параметр, под Constant Velocity Primitive (CV)> State Targets> Specify Velocity Target> Value, выбирают Bend Angle and Azimuth.
Sensing > Bend Angle > Position — Обнаружить ли угол поворотаВыберите этот параметр, чтобы включить порт qb.
Sensing > Bend Angle > Velocity — Обнаружить ли скорость угла поворотаВыберите этот параметр, чтобы включить порт wb.
Sensing > Bend Angle > Acceleration — Обнаружить ли ускорение угла поворотаВыберите этот параметр, чтобы включить порт bb.
Sensing > Azimuth > Position — Обнаружить ли азимутВыберите этот параметр, чтобы включить порт qa.
Sensing > Azimuth > Velocity — Обнаружить ли скорость азимутаВыберите этот параметр, чтобы включить порт wa.
Sensing > Azimuth > Acceleration — Обнаружить ли ускорение азимутаВыберите этот параметр, чтобы включить порт ba.
Mode — Объединенный режимNormal (значение по умолчанию) | Disengaged | Provided by InputЗадайте объединенный режим для симуляции.
| Метод | Описание |
|---|---|
Normal | Соединение обычно ведет себя в течение симуляции. |
Disengaged | Соединение расцеплено в течение симуляции. |
Provided by Input | Эта опция осушает порт mode, который можно соединить с входным сигналом, чтобы изменить объединенный режим во время симуляции. Объединенный режим нормален, когда входной сигнал 0 и расцеплен, когда входной сигнал-1. Объединенный режим может изменяться много раз во время симуляции. |
Direction — Направление измеренияFollower on Base (значение по умолчанию) | Base on FollowerСилы и крутящие моменты, которые система координат последователя проявляет на базовой системе координат или базовой системе координат, проявляют на системе координат последователя. Инвертирование этого направления изменяет знак измерений. Смотрите Направление Измерения Силы и Крутящего момента для получения дополнительной информации.
Follower on BaseОбнаружьте силу и крутящий момент, который система координат последователя проявляет на базовой системе координат.
Base on FollowerОбнаружьте силу и крутящий момент, который базовая система координат проявляет на системе координат последователя.
Resolution Frame — Структурируйте, чтобы разрешить измеренияBase (значение по умолчанию) | FollowerСистема координат раньше разрешала измерения. Выбор имеет значение, только если соединение имеет вращательные степени свободы.
BaseБлок соединений разрешает измерения в координатах базовой системы координат.
FollowerБлок соединений разрешает измерения в координатах системы координат последователя.
Constraint Force — Обнаружить ли ограничительную силу в соединенииВыберите этот параметр, чтобы включить порт fc.
Constraint Torque — Обнаружить ли ограничительный крутящий момент в соединенииВыберите этот параметр, чтобы включить порт tc.
Total Force — Обнаружить ли общую силу в соединенииВыберите этот параметр, чтобы включить порт ft.
Total Torque — Обнаружить ли общий крутящий момент в соединенииВыберите этот параметр, чтобы включить порт tt.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

