Датчик, который измеряет относительные пространственные отношения между двумя системами
Simscape / Мультитело / Системы координат и Преобразования

Блок Transform Sensor измеряет относительные пространственные отношения между двумя произвольными системами координат в модели Simscape™ Multibody™. Измерения разрешены в системе координат измерения блока и включают относительные переводы, вращения и их производные первого и второго раза.
Блок имеет два порта системы координат: B и F. Чтобы измерить относительное отношение между двумя системами, сначала соедините порты системы координат с системами координат, которые вы хотите измерить; затем установите параметр Measurement Frame на желаемую систему координат, чтобы разрешить измерения; в последний раз выберите желаемые выходные параметры, чтобы описать измерения.
Совет
Чтобы измерить абсолютные поступательные или вращательные количества системы координат, соедините порты F и B системы координат блока к этой системе координат и мировой системе координат модели, соответственно.
Установка параметра Measurement Frame влияет на все выходные параметры блока кроме тех перечисленных в таблице.
| Выходные параметры | Порты |
|---|---|
| Измерения вращения | q, axs, Q и R |
| Производные кватерниона | Q и Qdd |
| Матричные вращением производные | Rd и Rdd |
| Расстояние и его производные | dst, vdst и adst |
Блок Transform Sensor имеет пять различных выборов для параметра Measurement Frame: World, Base, Follower, Non-Rotating Base, и Non-Rotating Follower. Когда вы устанавливаете Measurement Frame на World, все измерения разрешены в мировой системе координат. Когда вы устанавливаете Measurement Frame на Base или Follower, разрешенные ускоряющие измерения включают центростремительные и Кориолисовы термины, если соответствующая система координат основы или последователя вращается. Когда вы устанавливаете параметр Measurement Frame на Non-Rotating Base или Non-Rotating Follower, измерения не удовлетворяют стандартному производному отношению, если соответствующая система координат основы или последователя вращается. Например, относительная линейная скорость не равняется производной времени относительного перевода. Смотрите Выбор Measurement Frame для получения дополнительной информации.
Блок имеет три параметризации, чтобы описать измеренные вращения: угловая ось, кватернион и матрица вращения. Выберите Angle и параметры Axis, чтобы использовать параметризацию угловой оси. Выберите Quaternion или параметры Transform под Rotation, чтобы использовать кватернион или матричную параметризацию вращения. Точно так же блок имеет три параметризации, чтобы описать вращательные скорости и ускорения: X-, Y- и координаты Z-; производные времени кватерниона; и матрица. Чтобы включить эту параметризацию, можно выбрать соответствующие параметры под Angular Velocity и Angular Acceleration. Смотрите Вращательные Измерения для получения дополнительной информации.
Блок имеет три системы координат, чтобы описать поступательные измерения: Декартов, цилиндрический, и сферический. Можно выбрать один или несколько из них одновременно. Смотрите Поступательные Измерения для получения дополнительной информации.
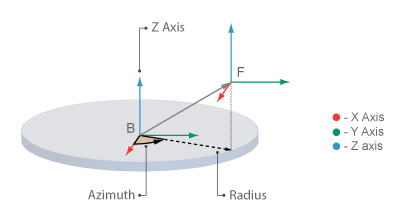
Таблицы суммируют координаты цилиндрических и сферических систем, и изображения показывают схемы систем. Для цели простоты, в изображениях, параметр Measurement Frame устанавливается на Base разрешить измерения.
Цилиндрические координаты
| Координата | Описание |
|---|---|
| Radius | Продолжительность проекции векторного BF, в плоскости X-Y системы координат измерения. |
| Azimuth | Угол Radius относительно положительного X - ось, в плоскости X-Y. Угол разрешен в системе координат измерения и падениях области значений [-π, π). |
| Z | Стандартный Декартов Z - координата векторного BF разрешенный в системе координат измерения. |
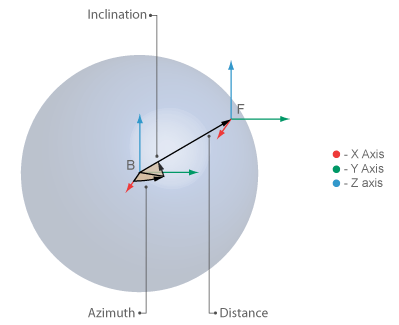
Сферические координаты
| Координата | Описание |
|---|---|
| Distance | Расстояние между источниками базы и последующей системы координат. |
| Azimuth | Угол проекции векторного BF в плоскости X-Y относительно положительного X - ось. Угол разрешен в системе координат измерения и падениях области значений [-π, π). |
| Inclination | Угол векторного BF относительно плоскости X-Y системы координат измерения. Угол падает в области значений [-π/2, π/2]. |
Чтобы использовать определенную систему координат, выберите соответствующие параметры. Например, если вы хотите использовать Декартову систему, чтобы описать измеренную относительную линейную скорость системы координат последователя, выберите X, Y и параметры Z под Velocity. Обратите внимание на то, что и установка параметра Measurement Frame и выбор систем координат влияют на поступательные измерения.
Выходные порты остаются скрытыми, пока вы не выбираете их соответствующие параметры. Каждый выходы порта изменяющийся во времени физический сигнал. Можно использовать блок PS-Simulink Converter, чтобы установить модули выходных параметров, когда вы соединяете блок Transform Sensor с Simulink® блоки.

