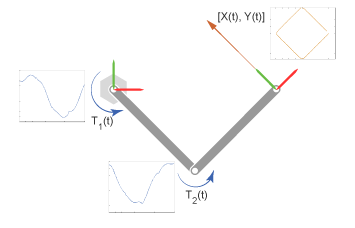
Обнаружение позволяет вам выполнить аналитические задачи на модели. Например, можно выполнить обратные кинематические исследования автоматизированной модели манипулятора. Путем предписания траектории исполнительного элемента конца и обнаружения объединенных сил приводов и крутящих моментов, можно получить изменяющийся во времени профиль каждого входного параметра.
Переменные, которые вы предписываете, входные параметры модели и те, вы обнаруживаете, выходные параметры модели, определяете, какие типы анализа можно выполнить. Путем изменения входов и выходов модели можно выполнить многочисленные другие аналитические типы. Например, чтобы выполнить прямой кинематический анализ автоматизированной модели манипулятора, можно предписать траектории соединения манипулятора и обнаружить получившуюся траекторию исполнительного элемента конца.
Чтобы поддержать различные аналитические задачи, программное обеспечение Simscape™ Multibody™ обеспечивает широкий спектр переменных, которые можно обнаружить. Каждая переменная принадлежит любой из двух категорий:
Переменные движения — Линейное и угловое положение, скорость и ускорение. Линейные переменные доступны в различных системах координат, включая Декартов, сферическое, и цилиндрический. Угловые переменные доступны в различных форматах, включая кватернион, угол оси, и преобразовывают матрицу.
Обеспечьте и закрутите переменные — Приведение в действие, ограничение, и общие силы и крутящие моменты, действующие в соединении, а также определенных силах и крутящих моментах, действующих за пределами соединения.
Целая возможность обнаружения охватывает несколько блоков Simscape Multibody. Два типа блоков обеспечивают обнаружение движения:
Блоки соединений — Движение, распознающееся между основой и системами координат порта последователя блока соединений. Переменные, которые можно обнаружить, организованы объединенным примитивом (призматический, вращательный, или сферический).
Преобразуйте блок Sensor — Движение, распознающееся между любыми двумя системами координат в модели. Этот блок предусматривает самую всестороннюю возможность обнаружения движения в Simscape Multibody.
Три типа блоков обеспечивают обнаружение крутящего момента и сила:
Блоки соединений — Приведение в действие, ограничение, и общая сила и крутящий момент, распознающийся между основой и системами координат порта последователя. Обнаружение силы приводов и крутящего момента располагается объединенным примитивом.
Ограничительные блоки — Ограничительная сила и крутящий момент между основой и системами координат порта последователя.
Определенные блоки Сил и Крутящих моментов — Общая сила блок проявляют между основой и системами координат порта последователя. Только определенные Силы и блоки Крутящих моментов обеспечивают этот тип обнаружения, такого как Spring and Damper Force и Inverse Square Law Force.
Каждое обнаружение выход находится в формате физического сигнала. Можно преобразовать физические сигналы в Simulink® сигналы с помощью блоков конвертера Simscape, например, для графического вывода целей с помощью блока Scope. Для получения информации о том, как использовать физические сигналы в моделях Simscape Multibody, смотрите Приведение в действие и Обнаружение с Физическими сигналами.
Inverse Square Law Force | Spring and Damper Force | Scope | Transform Sensor
