Реализуйте куколку в 3D среде
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Sim3D / Транспортное средство Sim3D / Компоненты
Блок Simulation 3D Dolly реализует куколку в 3D среде симуляции.
Чтобы использовать этот блок, гарантируйте, что блок Simulation 3D Scene Configuration находится в вашей модели. Если вы устанавливаете параметр Sample time этого блока к -1, блок использует шаг расчета, заданный в блоке Simulation 3D Scene Configuration.
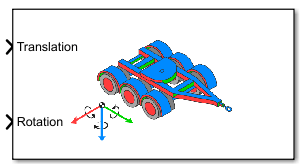
Блок ввел, использует транспортное средство Z-down предназначенная для правой руки (RH) Декартова система координат, заданная в SAE J6701. Система координат является инерционной и первоначально выровненная с транспортным средством геометрический центр:
Ось X — Вдоль транспортного средства продольная ось, точки вперед
Ось Y — Вдоль оси ответвления транспортного средства, точки направо
Ось Z — Точки вниз
Совет
Проверьте, что блок Simulation 3D Dolly выполняется перед блоком Simulation 3D Scene Configuration. Тем путем Simulation 3D Dolly готовит данные сигнала перед Нереальным Engine® 3D среда визуализации получает его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по каждому блоку и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Dolly — -1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Управления и Отображения.
[1] Комитет по стандартам динамики аппарата. Терминология динамики аппарата J670. Варрендэйл, усилитель мощности (УМ): SAE International, 2008.

