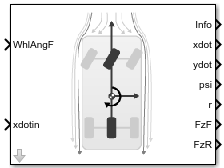
3DOF твердый кузов, чтобы вычислить продольный, боковой, и движение рыскания
Vehicle Dynamics Blockset / Кузов
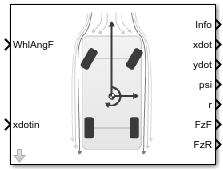
Блок Vehicle Body 3DOF реализует твердую модель кузова 2D оси, чтобы вычислить продольный, боковой, и движение рыскания. Блок составляет массу тела и аэродинамическое перетаскивание между осями из-за ускорения и регулирования.
Используйте этот блок в динамике аппарата, и автоматизировал ведущие исследования, чтобы смоделировать неголономное движение транспортного средства, когда тангаж транспортного средства, крен и вертикальное движение не являются значительными.
В библиотеке Vehicle Dynamics Blockset™ существует два типа блоков Vehicle Body 3DOF что модель, продольная, боковая, и движение рыскания.
| Блок | Установка дорожки транспортного средства | Реализация |
|---|---|---|
Vehicle Body 3DOF Single Track |
|
|
Vehicle Body 3DOF Dual Track |
| Действие сил в четырех углах транспортного средства или трудно указывает. |
Используйте параметр Axle forces, чтобы задать тип силы.
| Ось обеспечивает установку | Реализация |
|---|---|
|
|
|
|
|
|
Можно использовать эти параметры блоков, чтобы создать дополнительные входные порты. Эта таблица суммирует настройки.
Параметр панели входных сигналов | Input port | Описание |
|---|---|---|
Front wheel steering |
| Передний угол колеса, δF |
External wind |
| Скорость ветра, WX, WY, WZ, в инерционной системе координат |
| External forces | FExt | Внешняя сила на центре тяжести транспортного средства (CG), Fx, Fy, Fz, в зафиксированной транспортным средством системе координат |
| Rear wheel steering | WhlAngR | Задний угол колеса, δR |
| External friction | Mu | Коэффициент трения |
| External moments |
| Внешний момент о CG транспортного средства, Mx, My, Mz, в зафиксированной транспортным средством системе координат |
| Hitch forces | Fh | Цепляйтесь сила применилась к телу в местоположении помехи, Fhx, Fhy и Fhz, в зафиксированной транспортным средством системе координат |
| Hitch moments | Mh | Цепляйте момент в местоположении помехи, Mhx, Mhy и Mhz, о зафиксированной транспортным средством системе координат |
Initial longitudinal position |
| Начальное смещение CG транспортного средства вдоль зафиксированной землей Оси X, в m |
Initial lateral position |
| Начальное смещение CG транспортного средства вдоль зафиксированной землей Оси Y, в m |
Initial longitudinal velocity |
| Начальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X, в m/s |
Initial lateral velocity |
| Начальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y, в m/s |
Initial yaw angle |
| Начальное вращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (рыскание), в рад |
Initial yaw rate |
| Начальная скорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень рыскания), в rad/s |
Air temperature | AirTemp | Температура окружающего воздуха. Рассматривание этой возможности, если вы хотите варьироваться температура во время времени выполнения. |
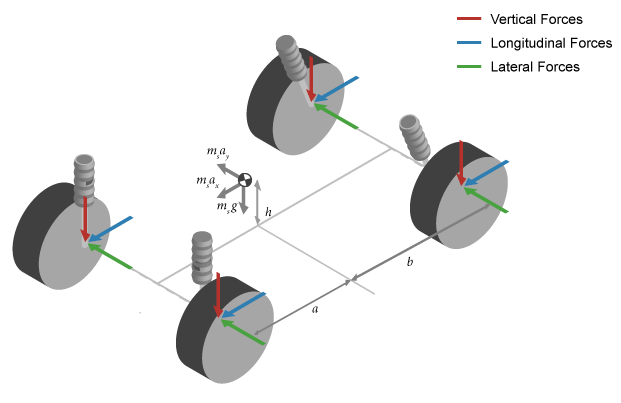
Блок Vehicle Body 3DOF реализует твердую модель кузова 2D оси, чтобы вычислить продольный, боковой, и движение рыскания. Блок составляет массу тела, аэродинамическое перетаскивание и распределение веса между осями из-за ускорения и регулирования. Чтобы определить движение транспортного средства, блок реализует эти уравнения для одноколейного пути, двойной дорожки, и перетащите вычисления.
Одноколейный путь
| Вычисление | Описание |
|---|---|
|
Динамика |
Блок использует эти уравнения, чтобы вычислить твердое тело плоская динамика. Если вы устанавливаете Axle forces на любой Если вы устанавливаете Axle forces на |
|
Внешние силы |
Внешние силы включают и перетаскивают и внешние входные параметры силы. Силы действуют на CG транспортного средства. Если вы устанавливаете Axle forces на Если вы устанавливаете Axle forces на Блок делит нормальные силы на номинальную нормальную загрузку, чтобы варьироваться эффективные параметры трения во время передачи загрузки и веса. Блок использует эти уравнения, чтобы обеспечить равновесие продольного и поперечного крена. |
|
Утомите силы | Блок использует отношение локальной переменной и продольный и поперечные скорости, чтобы определить углы промаха. Чтобы определить силы шины, блок использует углы промаха. Если вы устанавливаете Axle forces на |
Двойная дорожка
| Вычисление | Описание |
|---|---|
Динамика | Блок использует эти уравнения, чтобы вычислить твердое тело плоская динамика. Если вы устанавливаете Axle forces на |
Внешние силы | Внешние силы включают и перетаскивают и внешние входные параметры силы. Силы действуют на CG транспортного средства. Если вы устанавливаете Axle forces на Если вы устанавливаете Axle forces на Блок делит нормальные силы на номинальную нормальную загрузку, чтобы варьироваться эффективные параметры трения во время передачи загрузки и веса. Блок использует эти уравнения, чтобы обеспечить равновесие продольного и поперечного крена. |
Утомите силы | Блок использует отношение локальной переменной и продольный и поперечные скорости, чтобы определить углы промаха. Блок использует держащиеся углы, чтобы преобразовать силы шины к зафиксированной транспортным средством системе координат. Если вы устанавливаете Axle forces на |
Перетащить
| Вычисление | Описание |
|---|---|
|
Координатное преобразование |
Блок преобразовывает скорости ветра от инерционной системы координат до зафиксированной транспортным средством системы координат. |
|
Сила сопротивления | Чтобы определить относительную скорость полета, блок вычитает скорость ветра из скорости транспортного средства CG. Используя относительную скорость полета, блок определяет силу сопротивления. |
|
Перетащите моменты |
Используя относительную скорость полета, блок определяет моменты перетаскивания. |
Боковая угловая жесткость и релаксационная динамика
| Описание | Реализация |
|---|---|
Постоянные значения. | Блок использует постоянные значения жесткости для Cyf и Cyr. |
Интерполяционные таблицы в зависимости от угловых данных о жесткости и углов промаха. | Блок использует интерполяционные таблицы, которые являются функциями угловых данных о жесткости и углов промаха. |
Интерполяционные таблицы в зависимости от угловых данных о жесткости и углов промаха. Ускользните углы включают релаксационную длину динамические настройки. | Блок использует интерполяционные таблицы, которые являются функциями угловых данных о жесткости и углов промаха. Углы промаха включают релаксационную длину динамические настройки. Релаксационная длина аппроксимирует эффективную угловую силу жесткости, которая является функцией перемещения колеса. |
Уравнения используют эти переменные.
| Смещение CG транспортного средства, скорость и ускорение, вдоль зафиксированной транспортным средством оси X | |
| Смещение CG транспортного средства, скорость и ускорение, вдоль зафиксированной транспортным средством оси Y | |
ψ | Вращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (рыскание) |
r, |
Скорость вращения транспортного средства, о зафиксированной транспортным средством оси z (уровень рыскания) |
| Fxf, Fxr |
Продольные силы обратились к передним и задним колесам вдоль зафиксированной транспортным средством оси X |
| Fyf, Fyr |
Боковые силы обратились к передним и задним колесам вдоль зафиксированной транспортным средством оси Y |
| Fxext, Fyext, Fzext |
Внешние силы обратились к CG транспортного средства, вдоль зафиксированного транспортным средством x-, y-, и осей z |
| Fdx, Fdy, Fdz |
Сила сопротивления применилась к CG транспортного средства, вдоль зафиксированного транспортным средством x-, y-, и осей z |
| Fxinput, Fyinput, Fzinput |
Входные силы обратились к CG транспортного средства, вдоль зафиксированного транспортным средством x-, y-, и осей z |
| Mxext, Myext, Mzext |
Внешний момент о CG транспортного средства, о зафиксированном транспортным средством x-, y-, и осях z |
| Mdx, Mdy, Mdz |
Перетащите момент о CG транспортного средства, о зафиксированном транспортным средством x-, y-, и осях z |
| Mxinput, Myinput, Mzinput |
Введите момент о CG транспортного средства, о зафиксированном транспортным средством x-, y-, и осях z |
| Izz | Момент кузова инерции о зафиксированной транспортным средством оси z |
| Fxft, Fxrt |
Продольная сила шины, к которой применяются передние и задние колеса, вдоль зафиксированной транспортным средством оси X |
| Fyft, Fyft |
Боковая сила шины, к которой применяются передние и задние колеса, вдоль зафиксированной транспортным средством оси Y |
| Fxfl, Fxfr |
Продольная сила, к которой применяются оставленная передняя сторона и передние правильные колеса, вдоль зафиксированной транспортным средством оси X |
| Fyfl, Fyfr |
Боковая сила, к которой применяются оставленная передняя сторона и передние правильные колеса, вдоль зафиксированной транспортным средством оси Y |
| Fxrl, Fxrr |
Продольная сила, к которой применяются покинутая задняя часть и задние правильные колеса, вдоль зафиксированной транспортным средством оси X |
| Fyrl, Fyrr |
Боковая сила, к которой применяются покинутая задняя часть и задние правильные колеса, вдоль зафиксированной транспортным средством оси Y |
| Fxflt, Fxfrt |
Продольная сила шины, к которой применяются оставленная передняя сторона и передние правильные колеса, вдоль зафиксированной транспортным средством оси X |
| Fyflt, Fyfrt |
Боковая шина силы, к которой применяются оставленная передняя сторона и передние правильные колеса, вдоль зафиксированной транспортным средством оси Y |
| Fxrlt, Fxrrt |
Продольная сила шины, к которой применяются покинутая задняя часть и задние правильные колеса, вдоль зафиксированной транспортным средством оси X |
| Fyrlt, Fyrrt |
Боковая сила, к которой применяются покинутая задняя часть и задние правильные колеса, вдоль зафиксированной транспортным средством оси Y |
| Fzf, Fzr |
Нормальная сила, к которой применяются передние и задние колеса, вдоль зафиксированной транспортным средством оси z |
| Fznom |
Номинальная нормальная сила применилась к осям вдоль зафиксированной транспортным средством оси z |
| Fzfl, Fzfr |
Нормальная сила, к которой применяются передние левые и правые колеса, вдоль зафиксированной транспортным средством оси z |
| Fzrl, Fzrr |
Нормальная сила, к которой применяются задние левые и правые колеса, вдоль зафиксированной транспортным средством оси z |
| m |
Масса кузова |
| a, B |
Расстояние передних и задних колес, соответственно, от нормальной точки проекции CG транспортного средства на общую плоскость оси |
| h |
Высота CG транспортного средства выше плоскости оси |
| d | Боковое расстояние от геометрической средней линии до центра массы вдоль зафиксированной транспортным средством оси Y |
| hh | Высота помехи выше плоскости оси вдоль зафиксированной транспортным средством оси z |
| dh | Продольное расстояние помехи от нормальной точки проекции CG устройства подачи на общую плоскость оси |
| hl | Боковое расстояние от центра массы, чтобы цепляться вдоль зафиксированной транспортным средством оси Y. |
| αf, αr |
Переднее и заднее колесо подсовывает углы |
| αfl, αfr |
Переднее левое и правое колесо подсовывает углы |
| αrl, αrr |
Заднее левое и правое колесо подсовывает углы |
| δf, δr |
Передние и задние руководящие углы колеса |
| δrl, δrr |
Задние левые и правые руководящие углы колеса |
| δfl, δfr |
Передние левые и правые руководящие углы колеса |
| wf, wr |
Передние и задние ширины дорожки |
| Cyf, Cyr |
Передняя и задняя жесткость движения на повороте колеса |
| Cyfdata, Cyrdata | Переднее и заднее колесо, загоняющее данные о жесткости в угол |
| σf, σr | Передняя и задняя продолжительность релаксации колеса |
| αfσ, αrσ | Переднее и заднее колесо подсовывает углы, которые включают релаксационную длину |
| vwf, vwr | Величина переднего и заднего колеса hardpoint скорость |
| μf, μr |
Передний и задний коэффициент трения колеса |
| μfl, μfr |
Передний левый и правый коэффициент трения колеса |
| μrl, μrr |
Задний левый и правый коэффициент трения колеса |
| Cd | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной транспортным средством оси X |
| Cs | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной транспортным средством оси Y |
| Cl | Коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной транспортным средством оси z |
| Crm |
Момент крена аэродинамического сопротивления, действуя о зафиксированной транспортным средством оси X |
| Cpm |
Момент тангажа аэродинамического сопротивления, действуя о зафиксированной транспортным средством оси Y |
| Cym |
Момент рыскания аэродинамического сопротивления, действуя о зафиксированной транспортным средством оси z |
| Af |
Лобная область |
| R | Атмосферная определенная газовая константа |
| T | Экологическая температура воздуха |
| Pabs | Экологическое абсолютное давление |
| wx, wy, wz |
Скорость ветра, вдоль зафиксированного транспортным средством x-, y-, и осей z |
| Wx, Wy, Wz |
Скорость ветра, вдоль инерционного X-, Y-и осей Z |
Vehicle track — Количество дорожекSingle (bicycle) | DualВ библиотеке Vehicle Dynamics Blockset существует два типа блоков Vehicle Body 3DOF что модель, продольная, боковая, и движение рыскания.
| Блок | Установка дорожки транспортного средства | Реализация |
|---|---|---|
Vehicle Body 3DOF Single Track |
|
|
Vehicle Body 3DOF Dual Track |
| Действие сил в четырех углах транспортного средства или трудно указывает. |
Axle forces — Тип силы осиExternal longitudinal velocity | External longitudinal forces | External forcesИспользуйте параметр Axle forces, чтобы задать тип силы.
| Ось обеспечивает установку | Реализация |
|---|---|
|
|
|
|
|
|
Front wheel steering — WhlAngF входной портon (значение по умолчанию) | offЗадайте, чтобы создать входной порт WhlAngF.
External wind — WindXYZ входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт WindXYZ.
External forces — FExt входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт FExt.
External moments — MExt входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт MExt.
Rear wheel steering — WhlAngR входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт WhlAngR.
External friction \mu входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт Mu.
Hitch forces fh входной портon (значение по умолчанию) | offВыберите, чтобы создать входной порт Fh.
Hitch moments — Mh входной портon (значение по умолчанию) | offЗадайте, чтобы создать входной порт Mh.
Initial longitudinal position — X_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт X_o.
Initial lateral position — Y_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт Y_o.
Initial longitudinal velocity — xdot_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт xdot_o.
Initial lateral velocity — ydot_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт ydot_o.
Initial yaw angle — psi_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт psi_o.
Initial yaw rate — r_o входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт r_o.
Air temperature — AirTemp входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт AirTemp.
Number of wheels on front axle, NF — Переднее количество колесаscalarКоличество колес на передней оси, NF. Значение является безразмерным.
Number of wheels on rear axle, NR — Заднее количество колесаscalarКоличество колес на задней оси, NR. Значение является безразмерным.
Vehicle mass, m — Масса транспортного средстваscalarМасса транспортного средства, m, в kg.
Longitudinal distance from center of mass to front axle, a — Переднее расстояние осиscalarГоризонтальное расстояние a от CG транспортного средства до передней оси колеса, в m.
Longitudinal distance from center of mass to rear axle, b — Расстояние задней осиscalarГоризонтальное расстояние b от CG транспортного средства до задней оси колеса, в m.
Vertical distance from center of mass to axle plane, h высотаscalarВысота CG транспортного средства выше осей, h, в m.
Longitudinal distance from center of mass to hitch, dh — Расстояние от CM, чтобы цеплятьсяscalarПродольное расстояние от центра массы, чтобы цепляться, dh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Vertical distance from hitch to axle plane, hh — Расстояние от помехи до плоскости осиscalarВертикальное расстояние от помехи до плоскости оси, hh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Initial inertial frame longitudinal position, X_o — ПоложениеscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси X, в m.
Initial longitudinal velocity, xdot_o — СкоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X, в m/s.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, устанавливают Axle forces на одну из этих опций:
External longitudinal forces
External forces
Front tire corner stiffness, Cy_f — Жесткость12e3 (значение по умолчанию) | scalarПередняя угловая жесткость шины, Cyf, в N/rad.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Rear tire corner stiffness, Cy_r — Жесткость11e3 (значение по умолчанию) | scalarУгловая жесткость задней шины, Cyr, в N/rad.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Initial inertial frame lateral displacement, Y_o — ПоложениеscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси Y, в m.
Initial lateral velocity, ydot_o — СкоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y, в m/s.
Mapped corner stiffness — Выборoff (значение по умолчанию) | onВключает сопоставленное угловое вычисление жесткости.
Чтобы включить этот параметр, установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Include relaxation length dynamics — Включите релаксационную динамику длиныon (значение по умолчанию) | offВключает релаксационную динамику длины.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Lateral distance from geometric centerline to center of mass, d — РасстояниеscalarБоковое расстояние от геометрической средней линии до центра массы, d, в m, вдоль зафиксированного транспортным средством y. Положительные значения указывают, что CM транспортного средства справа от геометрической средней линии. Отрицательные величины указывают, что CM транспортного средства слева от геометрической средней линии.
Lateral distance from geometric centerline to hitch, hl — РасстояниеscalarБоковое расстояние от геометрической средней линии до помехи, hl, в m, вдоль зафиксированного транспортным средством y. Положительные значения указывают, что помеха справа от геометрической средней линии. Отрицательные величины указывают, что помеха слева от геометрической средней линии.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Track width width1- 2
vectorШирина дорожки, w, в m.
Чтобы включить этот параметр, установите Vehicle track на Dual.
Front tire(s) relaxation length, sigma_f — Релаксационная длинаscalarПередняя продолжительность релаксации шины, σf, в m.
Включить этот параметр:
Установите Vehicle track на одну из этих опций:
Single 2-axle
Dual 2-axle
Single 3-axle
Dual 3-axle
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Сделайте любой из них:
Выберите Mapped corner stiffness.
Очистите Mapped corner stiffness и выберите Include relaxation length dynamics.
Rear tire(s) relaxation length, sigma_r — Релаксационная длинаscalarПродолжительность релаксации задней шины, σr, в m.
Включить этот параметр:
Установите Vehicle track на одну из этих опций:
Single 2-axle
Dual 2-axle
Single 3-axle
Dual 3-axle
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Сделайте любой из них:
Выберите Mapped corner stiffness.
Очистите Mapped corner stiffness и выберите Include relaxation length dynamics.
Front axle slip angle breakpoints, alpha_f_brk — Точки остановаvectorПередние угловые точки останова промаха оси, αfbrk, в рад.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Front axle corner data, Cy_f_data — Точки останова[-9e3 9e3] (значение по умолчанию) | vectorПередние угловые данные об оси, Cyfdata, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle slip angle breakpoints, alpha_r_brk — Точки остановаvectorУгловые точки останова промаха задней оси, αrbrk, в рад.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle corner data, Cy_r_data данные[-9e3 9e3] (значение по умолчанию) | vectorУгловые данные о задней оси, Cyrdata, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Yaw polar inertia, Izz — ИнерцияscalarРыскание полярная инерция, в kg*m^2.
Initial yaw angle, psi_o — Вращение PsiscalarВращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (рыскание), в рад.
Initial yaw rate, r_o — Уровень рысканияscalarСкорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень рыскания), в rad/s.
Longitudinal drag area, Af — Эффективная площадь поперечного сечения транспортного средстваscalarЭффективная площадь поперечного сечения транспортного средства, Af, чтобы вычислить аэродинамическую силу сопротивления на транспортное средство, в m2.
Longitudinal drag coefficient, Cd — Коэффициент аэродинамического сопротивленияscalarКоэффициент аэродинамического сопротивления, Cd. Значение является безразмерным.
Longitudinal lift coefficient, Cl — Воздушный коэффициент лифтаscalarВоздушный коэффициент лифта, Cl. Значение является безразмерным.
Longitudinal drag pitch moment, Cpm — Сделайте подачу перетаскиваютscalarПродольный коэффициент момента тангажа перетаскивания, Cpm. Значение является безразмерным.
Relative wind angle vector, beta_w — Угол ветраvectorОтносительный угловой вектор ветра, βw, в рад.
Side force coefficient vector, Cs — Коэффициент силы стороны vectorКоэффициент вектора коэффициентов силы стороны, Cs. Значение является безразмерным.
Yaw moment coefficient vector, Cym — Момент рыскания перетаскиваетvectorКоэффициент вектора коэффициентов момента рыскания, Cym. Значение является безразмерным.
Absolute air pressure, Pabs — Давлениеscalar | scalarЭкологическое абсолютное давление, Pabs, в Па.
Air temperature, Tair — ТемператураscalarЭкологическая абсолютная температура, T, в K.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, g, в м/с^2.
Nominal friction scaling factor, mu — Масштабный коэффициент тренияscalarНоминальный масштабный коэффициент трения, μ. Значение является безразмерным.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите External Friction.
Longitudinal velocity tolerance, xdot_tol ДопускscalarПродольный скоростной допуск, в m/s.
Nominal normal force, Fznom — Нормальная силаscalarНоминальная нормальная сила, в N.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, устанавливают Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff — Продольное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной телом оси X, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Geometric lateral offset from center plane, latOff — Боковое смещениеscalarСмещение шасси транспортного средства от центральной плоскости вдоль зафиксированной телом оси Y, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff — Вертикальное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной телом оси z, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Wrap Euler angles, wrapAng — Выборoff (значение по умолчанию) | onПеренесите Углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям рыскания транспортного средства, которые находятся вне интервала, рассмотрите отмену выбора параметра, если вы хотите:
Отследите общее вращение рыскания транспортного средства.
Избегайте разрывов в средствах оценки состояния транспортного средства.
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения (SAE), 1992.
Vehicle Body 3DOF Longitudinal | Vehicle Body 6DOF | Vector Concatenate, Matrix Concatenate