Реализуйте представление Угла Эйлера шести уравнений степеней свободы движения
Aerospace Blockset / уравнения Движения / 6DOF
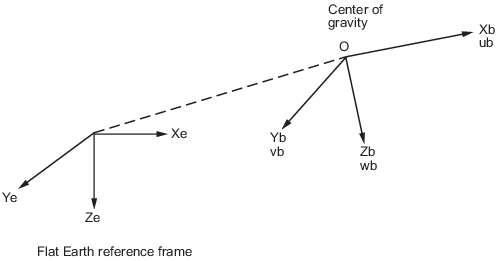
Блок 6DOF (Euler Angles) реализует представление Угла Эйлера шести уравнений степеней свободы движения, учитывая вращение зафиксированной телом координатной системы координат (Xb, Yb, Zb) о плоской Наземной системе координат (Xe, Ye, Ze). Для получения дополнительной информации об этих контрольных точках, см. Алгоритмы.
Блок принимает, что приложенные силы действуют в центре тяжести тела, и что масса и инерция являются постоянными.
Блок 6DOF (Euler Angles) использует эти концепции системы координат.
Источник зафиксированной телом координатной системы координат является центром тяжести тела, и тело принято, чтобы быть твердым, предположение, которое избавляет от необходимости рассматривать силы, действующие между отдельными элементами массы.
Плоская Наземная система координат рассматривается инерционной, превосходное приближение, которое позволяет силам из-за Наземного движения относительно "фиксированных звезд" быть пропущенными.
Поступательное движение зафиксированной телом координатной системы координат, где приложенные силы [Fx Fy Fz]T находятся в зафиксированной телом системе координат и массе тела, m принят постоянный.
Вращательная динамика зафиксированной телом системы координат, где прикладные моменты [L M N]T, и тензор инерции I относительно источника O.
Отношение между зафиксированным телом вектором скорости вращения, [p q r]T, и скорость изменения Углов Эйлера, , определяются путем решения Эйлеровых уровней в зафиксированную телом координатную систему координат.
Инвертирование J затем дает необходимое отношение, чтобы определить Эйлеров вектор уровня.
[1] Стивенс, Брайан, и Франк Льюис, управление самолетом и симуляция. Хобокен, NJ: Second Edition, John Wiley & Sons, 2003.
[2] Zipfel, Питер Х., моделирование и симуляция космической динамики аппарата. Рестон, Va: второй выпуск, образовательный ряд AIAA, 2007.
6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)
