Создайте ПИД-регулятор 2-DOF в стандартной форме, преобразуйте в стандартную форму ПИД-регулятор 2-DOF
C2 = pidstd2(Kp,Ti,Td,N,b,c)
C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts)
C2 = pidstd2(sys)
C2 = pid2(___,Name,Value)
pid2 объекты контроллера представляют две степени свободы (2-DOF) ПИД-регуляторы в параллельной форме. Использование pid2 любой, чтобы создать a pid2 объект контроллера от известных коэффициентов или преобразовывать модель динамической системы в a pid2 объект.
Две степени свободы (2-DOF) ПИД-регуляторы включают взвешивание заданного значения на пропорциональных и производных терминах. ПИД-регулятор с 2 степенями свободы способен к быстрому подавлению помех без значительного увеличения перерегулирования в отслеживании заданного значения. ПИД-регуляторы 2-DOF также полезны, чтобы смягчить влияние изменений в опорном сигнале на управляющем сигнале. Следующий рисунок показывает типичную архитектуру управления с помощью ПИД-регулятора 2-DOF.
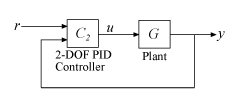
C2 = pidstd2(Kp,Ti,Td,N,b,c)Kp, интегратор и производные постоянные времени Ti, и Td, и производная фильтрует делитель N. У контроллера также есть заданное значение, взвешивающее b на пропорциональном термине и заданном значении, взвешивающем c на производном термине. Отношением между контроллером 2-DOF выход (u) и его два входных параметров (r и y) дают:
Это представление находится в standard form. Если все коэффициенты с действительным знаком, то получившийся C2 isa pidstd2 объект контроллера. Если один или несколько из этих коэффициентов является настраиваемым (realp или genmat), затем C2 настраиваемое обобщенное пространство состояний (genss) объект модели.
C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts)Ts. Отношением между выходом диспетчера и входными параметрами дают:
IF (z) и DF (z) является discrete integrator formulas для интегратора и производного фильтра. По умолчанию,
Чтобы выбрать различные дискретные формулы интегратора, используйте IFormula и DFormula свойства. (См. Свойства для получения дополнительной информации). Если DFormula = 'ForwardEuler' (значение по умолчанию) и N ≠ Inf, затем Ts, Td, и N должен удовлетворить Td/N > Ts/2. Это требование гарантирует устойчивый производный полюс фильтра.
C2 = pidstd2(sys)sys к стандартной форме pidstd2 объект контроллера.
C2 = pid2(___,Name,Value)Name,Value аргументы.
|
Пропорциональная составляющая.
Значение по умолчанию: 1 |
|
Время интегратора.
Когда Значение по умолчанию: |
|
Производное время.
Когда Значение по умолчанию: 0 |
|
Производный делитель фильтра.
Когда Значение по умолчанию: |
|
Взвешивание заданного значения на пропорциональном термине.
Когда Значение по умолчанию: 1 |
|
Взвешивание заданного значения на производном термине.
Когда Значение по умолчанию: 1 |
|
Размер шага. Создать дискретное время
Значение по умолчанию: 0 (непрерывное время) |
|
Динамическая система SISO, чтобы преобразовать в стандарт
|
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
Используйте Name,Value синтаксис, чтобы установить формулы численного интегрирования IFormula и DFormula из дискретного времени pidstd2 контроллер, или установить другие свойства объектов, такие как InputName и OutputName. Для получения информации о доступных свойствах pidstd2 диспетчер возражает, смотрите Свойства.
|
ПИД-регулятор 2-DOF, возвращенный как a
|
|
Веса заданного значения на пропорциональных и производных терминах, соответственно. |
|
Пропорциональная составляющая. Значение |
|
Время интегратора. |
|
Производное время. |
|
Производный делитель фильтра. |
|
Дискретная формула интегратора IF (z) для интегратора дискретного времени
Когда Значение по умолчанию: |
|
Дискретная формула интегратора DF (z) для производного фильтра дискретного времени
Когда Значение по умолчанию: |
|
Задержка в системе вводится. |
|
Задержка в системе Выход. |
|
Размер шага. Для моделей непрерывного времени, Изменение этого свойства не дискретизирует или передискретизирует модель. Использование Значение по умолчанию: |
|
Модули для переменной времени, шаг расчета
Изменение этого свойства не оказывает влияния на другие свойства, и поэтому изменяет полное поведение системы. Использование Значение по умолчанию: |
|
Введите название канала в виде вектора символов или 2 1 массив ячеек из символьных векторов. Используйте это свойство назвать входные каналы моделей контроллеров. Например, присвойте имена C.InputName = {'setpoint';'measurement'};В качестве альтернативы используйте автоматическое векторное расширение, чтобы присвоить оба входных имени. Например: C.InputName = 'C-input';Входные имена автоматически расширяются до Можно использовать краткое обозначение Входные названия канала имеют несколько использования, включая:
Значение по умолчанию: |
|
Введите модули канала в виде 2 1 массив ячеек из символьных векторов. Используйте это свойство отследить модули входного сигнала. Например, присвойте модули C.InputUnit = {'Volts';'mol/m^3'};
Значение по умолчанию: |
|
Введите группы канала. Это свойство не нужно для моделей ПИД-регулятора. Значение по умолчанию: |
|
Выведите название канала в виде вектора символов. Используйте это свойство назвать выходной канал моделей контроллеров. Например, присвойте имя C.OutputName = 'control';Можно использовать краткое обозначение Входные названия канала имеют несколько использования, включая:
Значение по умолчанию: Пустой символьный вектор, |
|
Выведите модули канала в виде вектора символов. Используйте это свойство отследить модули выходного сигнала. Например, присвойте модуль C.OutputUnit = 'Volts';
Значение по умолчанию: Пустой символьный вектор, |
|
Выведите группы канала. Это свойство не нужно для моделей ПИД-регулятора. Значение по умолчанию: |
|
Имя системы в виде вектора символов. Например, Значение по умолчанию: |
|
Любой текст, который вы хотите сопоставить с системой, сохраненной как строка или массив ячеек из символьных векторов. Свойство хранит, какой бы ни тип данных вы обеспечиваете. Например, если sys1.Notes = "sys1 has a string."; sys2.Notes = 'sys2 has a character vector.'; sys1.Notes sys2.Notes
ans =
"sys1 has a string."
ans =
'sys2 has a character vector.'
Значение по умолчанию: |
|
Любой тип данных вы хотите сопоставить с системой в виде любого MATLAB® тип данных. Значение по умолчанию: |
|
Выборка сетки для массивов моделей в виде структуры данных. Для массивов моделей, которые выведены путем выборки одной или нескольких независимых переменных, это дорожки свойства значения переменных, сопоставленные с каждой моделью в массиве. Эта информация появляется, когда вы отображаете или строите массив моделей. Используйте эту информацию, чтобы проследить результаты до независимых переменных. Установите имена полей структуры данных к именам переменных выборки. Установите значения полей к произведенным значениям переменных, сопоставленным с каждой моделью в массиве. Все переменные выборки должны быть числовыми и скаляр, оцененный, и все массивы произведенных значений должны совпадать с размерностями массива моделей. Например, предположите, что вы создаете 11 1 массив линейных моделей, sysarr.SamplingGrid = struct('time',0:10)Точно так же предположите, что вы создаете 6 9 массив моделей, [zeta,w] = ndgrid(<6 values of zeta>,<9 values of w>) M.SamplingGrid = struct('zeta',zeta,'w',w) Когда вы отображаете M M(:,:,1,1) [zeta=0.3, w=5] =
25
--------------
s^2 + 3 s + 25
M(:,:,2,1) [zeta=0.35, w=5] =
25
----------------
s^2 + 3.5 s + 25
...Для массивов моделей, сгенерированных путем линеаризации Simulink® модель в нескольких значениях параметров или рабочих точках, программное обеспечение заполняет Значение по умолчанию: |
Создайте непрерывное время 2-DOF контроллер PDF в стандартной форме. Для этого установите интегральную постоянную времени на Inf. Установите другие усиления и делитель фильтра к требуемым значениям.
Kp = 1; Ti = Inf; % No integrator Td = 3; N = 6; b = 0.5; % setpoint weight on proportional term c = 0.5; % setpoint weight on derivative term C2 = pidstd2(Kp,Ti,Td,N,b,c)
C2 =
s
u = Kp * [(b*r-y) + Td * ------------ * (c*r-y)]
(Td/N)*s+1
with Kp = 1, Td = 3, N = 6, b = 0.5, c = 0.5
Continuous-time 2-DOF PDF controller in standard form
Отображение показывает тип контроллера, формулу и значения параметров, и проверяет, что у контроллера нет термина интегратора.
Создайте дискретное время ПИ-контроллер 2-DOF в стандартной форме, с помощью трапециевидной формулы дискретизации. Задайте формулу с помощью Name,Value синтаксис.
Kp = 1; Ti = 2.4; Td = 0; N = Inf; b = 0.5; c = 0; Ts = 0.1; C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts,'IFormula','Trapezoidal')
C2 =
1 Ts*(z+1)
u = Kp * [(b*r-y) + ---- * -------- * (r-y)]
Ti 2*(z-1)
with Kp = 1, Ti = 2.4, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in standard form
Установка Td = 0 задает ПИ-контроллер без производного термина. Когда отображение показывает, значения N и c не используются в этом контроллере. Отображение также показывает, что трапециевидная формула используется для интегратора.
Создайте ПИД-регулятор 2-DOF в стандартной форме и установите свойства InputName динамической системы и OutputName. Именование входных параметров и выхода полезно, например, когда вы соединяете ПИД-регулятор с другими моделями динамической системы с помощью connect команда.
C2 = pidstd2(1,2,3,10,1,1,'InputName',{'r','y'},'OutputName','u')
C2 =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 1, Ti = 2, Td = 3, N = 10, b = 1, c = 1
Continuous-time 2-DOF PIDF controller in standard form
ПИД-регулятор с 2 степенями свободы имеет два входных параметров и один выход. Поэтому 'InputName' свойство является массивом, содержащим два имени, один для каждого входа. Отображение модели не показывает имена ввода и вывода для ПИД-регулятора, но можно исследовать значения свойств, чтобы видеть их. Например, проверьте входное имя контроллера.
C2.InputName
ans = 2x1 cell
{'r'}
{'y'}
Создайте 2 3 сетка ПИ-контроллеров 2-DOF в стандартной форме. Пропорциональная составляющая лежит в диапазоне от 1–2 через строки массивов и диапазоны постоянной времени интегратора от 5–9 через столбцы.
Чтобы создать массив ПИД-регуляторов, начните с массивов, представляющих усиления.
Kp = [1 1 1;2 2 2]; Ti = [5:2:9;5:2:9];
Когда вы передаете эти массивы pidstd2 команда, команда возвращает массив контроллеров.
pi_array = pidstd2(Kp,Ti,0,Inf,0.5,0,'Ts',0.1,'IFormula','BackwardEuler'); size(pi_array)
2x3 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
Если вы вводите скалярные значения для некоторых коэффициентов, pidstd2 автоматически расширяет их и присваивает то же значение всем записям в массиве. Например, в этом примере, Td = 0, так, чтобы все записи в массиве были ПИ-контроллерами. Кроме того, все записи в массиве имеют b = 0.5.
Доступ к записям в массиве с помощью индексации массива. Для массивов динамической системы первые две размерности являются размерностями ввода-вывода модели, и остальные измерения являются измерениями массива. Поэтому следующая команда извлекает (2,3) запись в массиве.
pi23 = pi_array(:,:,2,3)
pi23 =
1 Ts*z
u = Kp * [(b*r-y) + ---- * ------ * (r-y)]
Ti z-1
with Kp = 2, Ti = 9, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in standard form
Можно также создать массив ПИД-регуляторов с помощью stack команда.
C2 = pidstd2(1,5,0.1,Inf,0.5,0.5); % PID controller C2f = pidstd2(1,5,0.1,0.5,0.5,0.5); % PID controller with filter pid_array = stack(2,C2,C2f); % stack along 2nd array dimension
Эти команды возвращаются 1 2 массив контроллеров.
size(pid_array)
1x2 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
Все ПИД-регуляторы в массиве должны иметь тот же шаг расчета, дискретные формулы интегратора и свойства динамической системы, такие как InputName и OutputName.
Преобразуйте параллельную форму pid2 контроллер к стандартной форме.
Параллельная форма ПИДа описывает действия контроллера в терминах пропорционального, интеграла, и производная получает Kp, Ki, и Kd, и отфильтруйте постоянную времени Tf. Можно преобразовать параллельную форму pid2 контроллер к стандартной форме с помощью pidstd2 команда, при условии, что оба из следующего верны:
pid2 контроллер может быть описан в допустимой стандартной форме.
Усиления Kp, Ki, и Kd из pid2 контроллер у всех есть тот же знак.
Например, рассмотрите следующий контроллер параллельной формы.
Kp = 2; Ki = 3; Kd = 4; Tf = 2; b = 0.1; c = 0.5; C2_par = pid2(Kp,Ki,Kd,Tf,b,c)
C2_par =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 2, Ki = 3, Kd = 4, Tf = 2, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in parallel form.
Преобразуйте этот контроллер, чтобы быть параллельными форме с помощью pidstd2.
C2_std = pidstd2(C2_par)
C2_std =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 2, Ti = 0.667, Td = 2, N = 1, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in standard form
Отображение подтверждает форму нового стандарта. График отклика подтверждает, что две формы эквивалентны.
bodeplot(C2_par,'b-',C2_std,'r--') legend('Parallel','Standard','Location','Southeast')

Преобразуйте 2D вход, динамическая система непрерывного времени с одним выходом, которая представляет ПИД-регулятор 2-DOF стандартной форме pidstd2 контроллер.
Следующие матрицы пространства состояний представляют ПИД-регулятор 2-DOF.
A = [0,0;0,-8.181]; B = [1,-1;-0.1109,8.181]; C = [0.2301,10.66]; D = [0.8905,-11.79]; sys = ss(A,B,C,D);
Перепишите sys в терминах параметров ПИДа стандартной формы Kpti , Td, и N, и веса заданного значения b и c.
C2 = pidstd2(sys)
C2 =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 1.13, Ti = 4.91, Td = 1.15, N = 9.43, b = 0.66, c = 0.0136
Continuous-time 2-DOF PIDF controller in standard form
Преобразуйте динамическую систему дискретного времени, которая представляет ПИД-регулятор 2-DOF производным фильтром к стандартному pidstd2 форма.
Следующие матрицы пространства состояний представляют дискретное время ПИД-регулятор 2-DOF шагом расчета 0,05 с.
A = [1,0;0,0.6643]; B = [0.05,-0.05; -0.004553,0.3357]; C = [0.2301,10.66]; D = [0.8905,-11.79]; Ts = 0.05; sys = ss(A,B,C,D,Ts);
Когда вы преобразуете sys к форме ПИДа 2-DOF зависит результат, на которых дискретных формулах интегратора вы задаете для преобразования. Например, используйте значение по умолчанию, ForwardEuler, и для интегратора и для производной.
C2fe = pidstd2(sys)
C2fe =
1 Ts 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * --------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts/(z-1)
with Kp = 1.13, Ti = 4.91, Td = 1.41, N = 9.43, b = 0.66, c = 0.0136, Ts = 0.05
Sample time: 0.05 seconds
Discrete-time 2-DOF PIDF controller in standard form
Теперь преобразуйте использование Trapezoidal формула.
C2trap = pidstd2(sys,'IFormula','Trapezoidal','DFormula','Trapezoidal')
C2trap =
1 Ts*(z+1) 1
u = Kp * [(b*r-y) + ---- * -------- * (r-y) + Td * ----------------------- * (c*r-y)]
Ti 2*(z-1) (Td/N)+Ts/2*(z+1)/(z-1)
with Kp = 1.12, Ti = 4.89, Td = 1.41, N = 11.4, b = 0.658, c = 0.0136, Ts = 0.05
Sample time: 0.05 seconds
Discrete-time 2-DOF PIDF controller in standard form
Отображения показывают различие в получившихся содействующих значениях и функциональной форме.
Для некоторых динамических систем, пытаясь использовать Trapezoidal или BackwardEuler формулы интегратора приводят к недопустимым результатам, таким как отрицательный Ti, Td, или N значения. В таких случаях, pidstd2 возвращает ошибку.
Дискретизируйте стандартную форму непрерывного времени ПИД-регулятор 2-DOF и задайте интегральные и производные формулы фильтра.
Создайте непрерывное время pidstd2 контроллер и дискретизирует, это с помощью метода "нулевой порядок содержит" c2d команда.
C2con = pidstd2(10,5,3,0.5,1,1); % continuous-time 2-DOF PIDF controller C2dis1 = c2d(C2con,0.1,'zoh')
C2dis1 =
1 Ts 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * --------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts/(z-1)
with Kp = 10, Ti = 5, Td = 3.03, N = 0.5, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in standard form
Отображение показывает тот c2d вычисляет новые коэффициенты ПИДа для контроллера дискретного времени.
Дискретные формулы интегратора дискретизированного контроллера зависят от c2d метод дискретизации, как описано в Советах. Для zoh метод, оба IFormula и DFormula ForwardEuler.
C2dis1.IFormula
ans = 'ForwardEuler'
C2dis1.DFormula
ans = 'ForwardEuler'
Если вы хотите использовать различные формулы от тех возвращенных c2d, затем можно непосредственно установить Ts, IFormula, и DFormula свойства контроллера к требуемым значениям.
C2dis2 = C2con; C2dis2.Ts = 0.1; C2dis2.IFormula = 'BackwardEuler'; C2dis2.DFormula = 'BackwardEuler';
Однако эти команды не вычисляют новые коэффициенты для дискретизированного контроллера. Чтобы видеть это, исследуйте C2dis2 и сравните коэффициенты с C2con и C2dis1.
C2dis2
C2dis2 =
1 Ts*z 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * ----------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts*z/(z-1)
with Kp = 10, Ti = 5, Td = 3, N = 0.5, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in standard form
Чтобы спроектировать ПИД-регулятор для конкретного объекта, использовать pidtune или pidTuner. Чтобы создать настраиваемый ПИД-регулятор 2-DOF как блок системы управления, использовать tunablePID2.
Повредить контроллер 2-DOF в два компонента элемента управления SISO, такие как контроллер обратной связи и контроллер прямого распространения, использование getComponents.
Создайте массивы pidstd2 контроллеры:
Определение значений массивов для одного или нескольких коэффициентов Kpti , TdNB, и c.
Определение массива динамических систем sys преобразовывать в pid2 диспетчер возражает.
Используя stack создавать массивы из отдельных контроллеров или меньших массивов.
Передача массива моделей объекта управления к pidtune.
В массиве pidstd2 контроллеры, у каждого контроллера должен быть тот же шаг расчета Ts и дискретные формулы интегратора IFormula и DFormula.
Чтобы создать или преобразовать в контроллер параллельной формы, использовать pid2. Параллельная форма описывает действия контроллера в терминах пропорционального, интеграла, и производная получает Kp, Ki и Kd и постоянную времени фильтра Tf. Например, отношением между входными параметрами и выходом параллельной формы непрерывного времени ПИД-регулятор 2-DOF дают:
Существует два способа дискретизировать непрерывное время pidstd2 контроллер:
Используйте c2d команда. c2d вычисляет новые значения параметров для дискретизированного контроллера. Дискретные формулы интегратора дискретизированного контроллера зависят от c2d метод дискретизации вы используете, как показано в следующей таблице.
c2d Метод дискретизации | IFormula | DFormula |
|---|---|---|
'zoh' | ForwardEuler | ForwardEuler |
'foh' | Trapezoidal | Trapezoidal |
'tustin' | Trapezoidal | Trapezoidal |
'impulse' | ForwardEuler | ForwardEuler |
'matched' | ForwardEuler | ForwardEuler |
Для получения дополнительной информации о c2d методы дискретизации, Смотрите c2d страница с описанием. Для получения дополнительной информации о IFormula и DFormula, смотрите Свойства.
Если вы требуете различных дискретных формул интегратора, можно дискретизировать контроллер непосредственно установкой Ts, IFormula, и DFormula к требуемым значениям. (См., Дискретизируют Стандартную Форму ПИД-регулятор 2-DOF.) Однако этот метод не вычисляет новое усиление и постоянные значения фильтра для дискретизированного контроллера. Поэтому этот метод может дать к более плохому соответствию между непрерывным - и дискретным временем pidstd2 контроллеры, чем использование c2d.
pid2 | pidstddata2 | pidtune | pidTuner | getComponents
