Настраивающие инструменты ПИДа Control System Toolbox™ могут настроить многих ПИД и типы ПИД-регулятора 2-DOF. Термин controller type относится, к которому термины присутствуют в действии контроллера. Например, ПИ-контроллер имеет только пропорциональное и интегральный термин, в то время как контроллер PIDF содержит пропорциональный, интегратор, и отфильтровал производные термины. Эта тема обобщает типы ПИД-регуляторов, доступных для настраивания следующих инструментов:
Приложение PID Tuner
Настройте задачу ПИД-регулятора в Live Editor
pidtune команда
Настраивающие инструменты ПИДа позволяют вам спроектировать многочисленные типы контроллера. Как вы указываете, что тип контроллера зависит, на котором инструменте вы используете.
Для настройки командной строки обеспечьте type аргумент к pidtune команда. Например, C = pidtune(G,'PI') настраивает ПИ-контроллер для объекта G.
В качестве альтернативы, если вы обеспечиваете существующий объект контроллера как входной параметр C0, pidtune настраивает новый контроллер того же типа и формы. Например, предположите C0 pid объект контроллера, который имеет пропорциональное и производное действие только (контроллер PD). Затем pidtune(G,C0) генерирует новый pid объект контроллера, который также имеет только пропорциональное и производное действие. Смотрите pidtune.
Для больше об определенных типах контроллера, доступных с настройкой командной строки, см.:
В приложении PID Tuner можно задать тип контроллера, когда вы открываете приложение или изменяете тип контроллера в рамках приложения.
Задайте тип, когда открытие приложения — Обеспечивает type аргумент к pidTuner команда, когда вы открываете PID Tuner. Например, pidTuner(G,'PIDF2') открывает PID Tuner с первоначальным проектом, который является ПИД-регулятором 2-DOF с фильтром на производном термине.
Укажите, что тип с существующим объектом контроллера — Предоставляет базовому контроллеру Cbase аргумент к pidTuner команда, когда вы открываете PID Tuner. PID Tuner проектирует контроллер того же типа как Cbase. Например, предположите C0 pid объект контроллера, который имеет пропорциональное и производное действие только (контроллер PD). Затем pidTuner(G,C0) открывает PID Tuner с первоначальным проектом, который является контроллером PD.
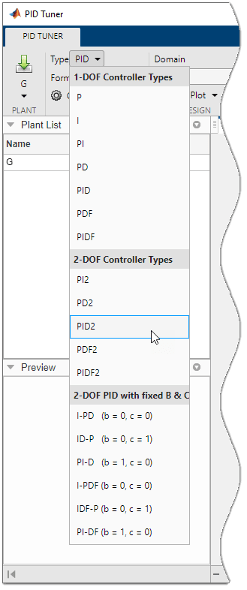
Задайте тип контроллера в рамках приложения — В PID Tuner, используйте меню Type, чтобы изменить типы контроллера.
Для больше об определенных типах контроллера, доступных в приложении PID Tuner:
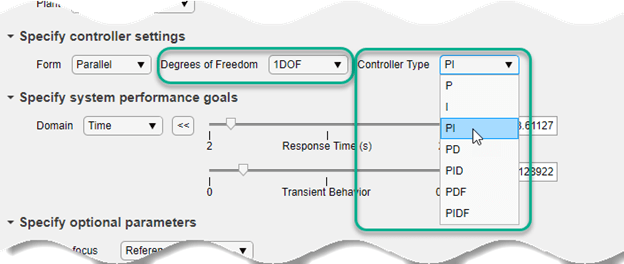
В задаче ПИД-регулятора Мелодии в Live Editor вы задаете тип контроллера с помощью меню Degrees of Freedom и Controller Type.
Для больше об определенных типах контроллера, доступных в задаче ПИД-регулятора Мелодии, см.:
Следующая таблица обобщает типы ПИД-регулятора 1-DOF, доступные со всеми инструментами, и обеспечивает представительные формулы контроллера для параллельной формы. Стандартная форма и формулы дискретного времени аналогичны.
| Ввод | Действия контроллера | Диспетчер непрерывного времени Формула (параллельны форме), | Диспетчер дискретного времени Формула (параллельны форме, методу интегрирования ForwardEuler), |
|---|---|---|---|
P | Пропорциональный только | Kp | Kp |
I | Интеграл только |
|
|
PI | Пропорциональный и интеграл |
|
|
PD | Пропорциональный и производный |
|
|
PDF | Пропорциональный и производный с фильтром первого порядка на производном термине |
|
|
PID | Пропорциональный, интеграл и производная |
|
|
PIDF | Пропорциональный, интеграл и производная с фильтром первого порядка на производном термине |
|
|
Настраивающие инструменты могут автоматически спроектировать типы ПИД-регулятора 2-DOF со свободными весами заданного значения. Следующая таблица обобщает типы контроллера 2-DOF, доступные во всех инструментах, и обеспечивает представительные формулы контроллера для параллельной формы. Формулы стандартной формы аналогичны. Для получения дополнительной информации о ПИД-регуляторах 2-DOF обычно, смотрите ПИД-регуляторы с двумя степенями свободы.
| Ввод | Действия контроллера | Диспетчер непрерывного времени Формула (параллельны форме), | Диспетчер дискретного времени Формула (параллельны форме, методу интегрирования ForwardEuler), |
|---|---|---|---|
PI2 | Пропорциональный 2-DOF и интеграл |
|
|
PD2 | 2-DOF, пропорциональный и производный |
|
|
PDF2 | 2-DOF, пропорциональный и производный с фильтром первого порядка на производном термине |
|
|
PID2 | Пропорциональный 2-DOF, интеграл и производная |
|
|
PIDF2 | Пропорциональный 2-DOF, интеграл и производная с фильтром первого порядка на производном термине |
|
|
С управлением ПИДом ступенчатые изменения в опорном сигнале могут вызвать скачки в управляющем сигнале, внесенном пропорциональными и производными терминами. Путем фиксации весов заданного значения контроллера 2-DOF можно смягчить влияние на управляющий сигнал, проявленный изменениями в опорном сигнале. Например, считайте отношение между входными параметрами r (заданное значение) и y (обратная связь) и выход u (управляющий сигнал) непрерывного времени ПИД-регулятор 2-DOF.
Если вы устанавливаете b = 0 и c = 0, то изменения в заданном значении r не питаются через непосредственно или к пропорциональному или к производным терминам в u. b = 0, c = 0 контроллеров называются, I-PD вводят контроллер. Контроллеры I-PD также полезны для улучшения подавления помех.
PID Tuner и pidtune может спроектировать типы контроллера фиксированного веса заданного значения, полученные в итоге в следующей таблице. Стандартная форма и формулы дискретного времени аналогичны.
| Ввод | Действия контроллера | Диспетчер непрерывного времени Формула (параллельны форме), | Диспетчер дискретного времени Формула (параллельны форме, методу интегрирования ForwardEuler), |
|---|---|---|---|
I-PD | ПИД с 2 степенями свободы с b = 0, c = 0 |
|
|
I-PDF | С 2 степенями свободы PIDF с b = 0, c = 0 |
|
|
ID-P | ПИД с 2 степенями свободы с b = 0, c = 1 |
|
|
IDF-P | С 2 степенями свободы PIDF с b = 0, c = 1 |
|
|
PI-D | ПИД с 2 степенями свободы с b = 1, c = 0 |
|
|
PI-DF | С 2 степенями свободы PIDF с b = 1, c = 0 |
|
|
