В Control System Toolbox™ PID Tuner позволяет вам выполнить автоматическую, интерактивную настройку ПИД-регуляторов для объектов, представленных моделями LTI.
Для получения информации об использовании PID Tuner, чтобы настроить блок PID Controller в Simulink® модель, смотрите Введение в Основанный на модели ПИД, Настраивающий Simulink (Simulink Control Design).
Используйте PID Tuner, чтобы в интерактивном режиме спроектировать ПИД-регулятор SISO в пути прямого распространения одноконтурной настройки управления с обратной связью единицы.
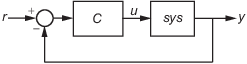
PID Tuner автоматически проектирует контроллер для вашего объекта. Вы задаете тип контроллера (P, я, PI, PD, PDF, ПИД, PIDF) и форма (параллель или стандарт).
Можно также использовать PID Tuner, чтобы спроектировать ПИД-регулятор 2-DOF для настройки обратной связи этого рисунка:
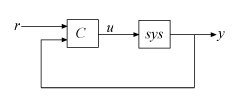
PID Tuner может спроектировать ПИД-регуляторы 2-DOF, в которых веса заданного значения могут быть свободными и настраиваемые параметры. PID Tuner может также спроектировать контроллеры, в которых веса заданного значения фиксируются в настройках общего контроля, таких как I-PD и ПИД.
Можно анализировать проект с помощью множества графиков отклика, и в интерактивном режиме настроить проект, чтобы соответствовать требованиям к производительности.
Чтобы запустить PID Tuner, используйте pidTuner команда:
pidTuner(sys,type)
где sys линейная модель объекта, которым вы хотите управлять, и type указывает на тип контроллера, чтобы спроектировать.
В качестве альтернативы войдите
pidTuner(sys,Cbase)
где Cbase базовый контроллер, позволяя вам сравнить эффективность спроектированного контроллера к эффективности Cbase.
Для получения дополнительной информации о sys и Cbase, смотрите pidTuner страница с описанием.
Примечание
Можно также открыть PID Tuner из MATLAB® рабочий стол, во вкладке Apps. Когда вы сделаете так, используйте меню Plant в PID Tuner, чтобы задать вашу модель объекта управления.
Чтобы выбрать тип контроллера, используйте один из этих методов:
Задайте тип, когда открытие приложения — Обеспечивает type аргумент к pidTuner команда, когда вы открываете PID Tuner. Например, pidTuner(G,'PIDF2') открывает PID Tuner с первоначальным проектом, который является ПИД-регулятором 2-DOF с фильтром на производном термине.
Укажите, что тип с существующим объектом контроллера — Предоставляет базовому контроллеру Cbase аргумент к pidTuner команда, когда вы открываете PID Tuner. PID Tuner проектирует контроллер того же типа как Cbase. Например, предположите C0 pid объект контроллера, который имеет пропорциональное и производное действие только (контроллер PD). Затем pidTuner(G,C0) открывает PID Tuner с первоначальным проектом, который является контроллером PD.
Задайте тип контроллера в рамках приложения — В PID Tuner, используйте меню Type, чтобы изменить типы контроллера.
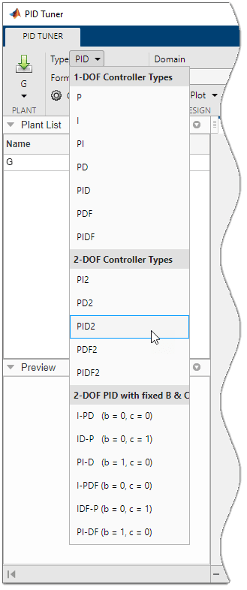
Следующие таблицы обобщают доступные типы ПИД-регулятора. Для получения дополнительной информации об этих типах контроллера, смотрите Типы ПИД-регулятора для Настройки.
type введите к pidTuner | Запись в меню Type | Действия контроллера |
|---|---|---|
'P' | P | Пропорциональный только |
'I' | I | Интеграл только |
'PI' | PI | Пропорциональный и интеграл |
'PD' | PD | Пропорциональный и производный |
'PDF' | PDF | Пропорциональный и производный с фильтром первого порядка на производном термине |
'PID' | PID | Пропорциональный, интеграл и производная |
'PIDF' | PIDF | Пропорциональный, интеграл и производная с фильтром первого порядка на производном термине |
PID Tuner может автоматически спроектировать типы ПИД-регулятора 2-DOF со свободными весами заданного значения. Следующая таблица обобщает типы контроллера 2-DOF в PID Tuner. Для получения дополнительной информации о ПИД-регуляторах 2-DOF обычно, смотрите ПИД-регуляторы с двумя степенями свободы.
type введите к pidTuner | Запись в меню Type | Действия контроллера |
|---|---|---|
'PI2' | PI2 | Пропорциональный 2-DOF и интеграл |
'PD2' | PD2 | 2-DOF, пропорциональный и производный |
'PDF2' | PDF2 | 2-DOF, пропорциональный и производный с фильтром первого порядка на производном термине |
'PID2' | PID2 | Пропорциональный 2-DOF, интеграл и производная |
'PIDF2' | PIDF2 | Пропорциональный 2-DOF, интеграл и производная с фильтром первого порядка на производном термине |
Используйте PID Tuner, чтобы спроектировать типы контроллера фиксированного веса заданного значения, полученные в итоге в следующей таблице. Для получения дополнительной информации об этих типах контроллера, смотрите Типы ПИД-регулятора для Настройки.
type введите к pidTuner | Запись в меню Type | Действия контроллера |
|---|---|---|
'I-PD' | I-PD | ПИД с 2 степенями свободы с b = 0, c = 0 |
'I-PDF' | I-PDF | С 2 степенями свободы PIDF с b = 0, c = 0 |
'ID-P' | ID-P | ПИД с 2 степенями свободы с b = 0, c = 1 |
'IDF-P' | IDF-P | С 2 степенями свободы PIDF с b = 0, c = 1 |
'PI-D' | PI-D | ПИД с 2 степенями свободы с b = 1, c = 0 |
'PI-DF' | PI-DF | С 2 степенями свободы PIDF с b = 1, c = 0 |
Если sys модель дискретного времени с шагом расчета Ts, PID Tuner проектирует дискретное время pid контроллер, использующий ForwardEuler дискретная формула интегратора. Чтобы спроектировать контроллер, который имеет различные дискретные формулы интегратора, используйте один из следующих методов:
Предоставьте базовому контроллеру дискретного времени Cbase к команде запуска pidTuner. PID Tuner проектирует контроллер, который имеет те же дискретные формулы интегратора как Cbase.
После запуска PID Tuner нажмите Options, чтобы открыть диалоговое окно Controller Options. Выберите дискретные формулы интегратора из меню Integral Formula и Derivative Formula.
Для получения дополнительной информации о дискретных формулах интегратора, смотрите pid, pid2, pidstd, и pidstd2 страницы с описанием.
Когда вы используете type введите к pidTuner, PID Tuner проектирует контроллер в параллельной форме. Чтобы спроектировать контроллер в стандартной форме, используйте один из следующих методов:
Предоставьте базовому контроллеру стандартной формы Cbase к команде запуска pidTuner. PID Tuner проектирует контроллер той же формы как Cbase.
Используйте меню Form, чтобы изменить форму контроллера после запуска PID Tuner.
Для получения дополнительной информации о параллельных и стандартных формах контроллера, смотрите pid, pid2, pidstd, и pidstd2 страницы с описанием.
