Вставьте парковочные места в парковку
insertParkingSpaces функция вставляет сетку парковочных мест в парковку в заданном положении или вдоль заданных ребер.
Чтобы вставить пробелы в заданном положении, используйте Position аргумент значения имени.
Чтобы вставить пробелы вдоль заданных ребер, используйте Edge аргумент значения имени.
Чтобы использовать эту функцию, необходимо задать любой Position или Edge, но вы не можете задать обоих.
insertParkingSpaces(___, опции наборов с помощью аргументов name-value, в дополнение к входным параметрам от предыдущего синтаксиса. Можно задать Name=Value)Position и другие аргументы name-value в любом порядке после других входных параметров.
insertParkingSpaces(lot,space,8,Rows=2,Position=[25 25]) вставляет 2 8 сетка парковочных мест в парковку в положении (25, 25) в метрах от источника сценария.insertParkingSpaces(___,Edge= опции наборов с помощью аргументов name-value, в дополнение к любой комбинации входных параметров от предыдущих синтаксисов. Можно задать edge,Name=Value)Edge и другие аргументы name-value в любом порядке после других входных параметров.
insertParkingSpaces(lot,space,Edge=[1,3],Offset=5) вставляет строку парковочных мест вдоль ребер 1 и 3 из парковки и возмещает каждую строку от ее ребра на 5 метров.Создайте ведущий сценарий, содержащий короткую дорогу, которая вводит в парковку, которая 50 метров длиной и 20 метров шириной. Постройте парковку и отобразите числа ребра, вдоль которых можно вставить парковочные места. Поскольку ребро 3 формы перекресток с дорогой, ее номер ребра не отображается на графике, но можно все еще вставить пробелы вдоль него.
scenario = drivingScenario;
roadcenters = [25 30; 25 15];
road(scenario,roadcenters);
vertices = [0 0; 50 0; 50 20; 0 20];
lot = parkingLot(scenario,vertices);
plot(scenario,ParkingLotEdges="On")
Задайте тип парковочного места, чтобы добавить вдоль одного из ребер. Установите угол 60 градусов. Постройте парковочное место.
space = parkingSpace(Angle=60); plot(space)

Вставьте угловые пробелы вдоль ребра 1 из парковки.
insertParkingSpaces(lot,space,Edge=1)

Вставьте повернутые пробелы вдоль ребра 3: пять выше соединения и пять ниже соединения. Возместите эти пробелы на 3 метра и в 30 метрах от нижней части ребра 3, соответственно. Инвертируйте угол пробелов, используемых вдоль ребра 1.
numSpaces = 5; space = parkingSpace(Angle=120); insertParkingSpaces(lot,space,numSpaces,Edge=3,Offset=3) insertParkingSpaces(lot,space,numSpaces,Edge=3,Offset=30)

Создайте ведущий сценарий, содержащий 50-метровую дорогу и 20 30 парковка метра. Постройте сценарий.
scenario = drivingScenario; roadcenters = [0 50; 50 0]; road(scenario,roadcenters); vertices = [40 10; 25 -5; 5 15; 20 30]; lot = parkingLot(scenario,vertices); plot(scenario)

Вставьте сетку парковки в партию. Задайте сетку с двумя строками восьми пробелов. Используйте размерности парковочного места по умолчанию и поместите сетку в углу в 45 градусов, чтобы выровнять ее с дорогой.
space = parkingSpace; numSpaces = 8; insertParkingSpaces(lot,space,numSpaces,Rows=2,Position=[15 20],Orientation=45)

Создайте парковку, которая содержит смесь парковочных мест, областей без парковок и доступных пробелов.
Задайте парковочное место, чтобы использовать на парковке. Используйте настройки по умолчанию. Постройте пробел.
space = parkingSpace;
plot(space,Origin="off")
Задайте области без парковок, чтобы использовать на парковке. Задайте цвет белого и ширины, которая составляет один метр меньше, чем ширина парковочного места по умолчанию. Постройте пробел.
noSpace = parkingSpace(Type="NoParking",Width=(space.Width - 1),MarkingColor="White"); plot(noSpace,Origin="off")

Задайте доступное парковочное место, чтобы использовать на парковке. Задайте ширину, которая составляет один метр больше, чем ширина парковочного места по умолчанию. Постройте пробел.
accessibleSpace = parkingSpace(Type="Accessible",Width=(space.Width + 1)); plot(accessibleSpace,Origin="off")

Создайте ведущий сценарий, содержащий парковку с непрямоугольным размещением. Постройте парковку и отобразите числа ребра, вдоль которых можно добавить парковочные места.
scenario = drivingScenario;
vertices = [0 0; 32 -10.5; 32 -50.5; 25 -57.5; 0 -57.5];
lot = parkingLot(scenario,vertices);
plot(scenario,ParkingLotEdges="on")
Вставьте парковочные места по умолчанию вдоль первых трех ребер парковки. Чтобы постараться не перекрывать парковочные места, внесите эти корректировки во вставки:
Вдоль ребра 1, вставьте только 10 пробелов.
Вдоль ребра 2, возмещает пробелы на 5 метров от первой вершины ребра.
Вдоль ребра 3, возмещает пробелы на 3 метра от первой вершины ребра.
numSpaces = 10; insertParkingSpaces(lot,space,numSpaces,Edge=1) insertParkingSpaces(lot,space,Edge=2,Offset=5) insertParkingSpaces(lot,space,Edge=3,Offset=3)

В центре парковки вставьте 2 10 сетка парковочных мест, содержащих 8 столбцов пробелов по умолчанию, 1 столбец областей без парковок и 1 столбец доступных пробелов.
insertParkingSpaces(lot,[space noSpace accessibleSpace],[8 1 1],Position=[12 -18],Rows=2)

lot — ПарковкаParkingLot объектПарковка, на которой можно вставить пробелы в виде ParkingLot объект. Чтобы создать парковку, используйте parkingLot функция.
space — Парковочные места, чтобы вставитьparkingSpace возразите | вектор из parkingSpace объектыПарковочные места, чтобы вставить в виде parkingSpace объект или вектор из parkingSpace объекты.
space и numSpaces должен содержать то же число элементов. Каждый элемент numSpaces задает количество парковочных мест, типа, заданного в соответствующем положении space, включать в сетку парковки.
Пример: [parkingSpace parkingSpace(Type="NoParking") parkingSpace(Type="Accessible")]
numSpaces — Количество пробелов в парковке сеткиКоличество пробелов в сетке парковки в виде положительного целого числа или вектора из положительных целых чисел.
space и numSpaces должен содержать то же число элементов. Каждый элемент numSpaces задает количество парковочных мест, типа, заданного в соответствующем положении space, включать в сетку парковки.
Вставленная сетка парковки содержит sum(numSpaces) парковочные места. Если вы задаете больше пробелов, чем может соответствовать парковке, то вставленные парковочные места расширяют мимо границы парковки.
Пример: [5 1 1]
position — Положение, в котором можно вставить сетку парковки[x y]Положение, в котором можно вставить сетку парковки в виде вектора-строки из формы [x y] в метрах от источника сценария. insertParkingSpaces функция определяет вертикальное изменение (z - значение) сетки парковки на основе вертикального изменения входной парковки lot.
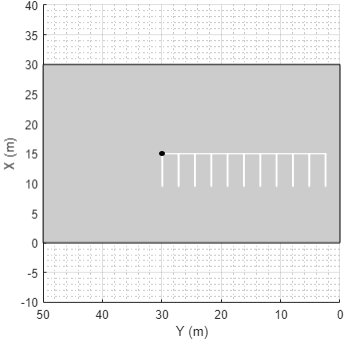
Для сеток парковки одной строки (Rows=1position задает верхний левый угол сетки парковки.
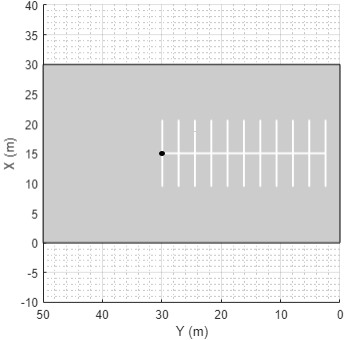
Для сеток парковки 2D строки (Rows=2position задает среднюю точку крайней левой маркировки маршрута парковки.
Эта таблица показывает демонстрационные положения для одной строки и сеток парковки 2D строки.
| Положение (сетка парковки одной строки) | Положение (сетка парковки 2D строки) |
|---|---|
|
|
|
Пример: [10 15]
edge — Ребра, вдоль которых можно вставить сетку парковкиРебра, вдоль которых можно вставить сетку парковки в виде положительного целого числа или вектора из положительных целых чисел. Допустимые значения ребра находятся в области значений [1, M], где M является максимальным количеством ребер на парковке. Чтобы просмотреть ребра, вдоль которых можно вставить сетку парковки, используйте plot функционируйте, чтобы построить ведущий сценарий, который содержит парковку, lot, и включите ребра парковки. Пример кода:
plot(scenario,ParkingLotEdges="on")Пример: [2 4]
Задайте дополнительные пары аргументов как Name1=Value1,...,NameN=ValueN, где Name имя аргумента и Value соответствующее значение. Аргументы name-value должны появиться после других аргументов, но порядок пар не имеет значения.
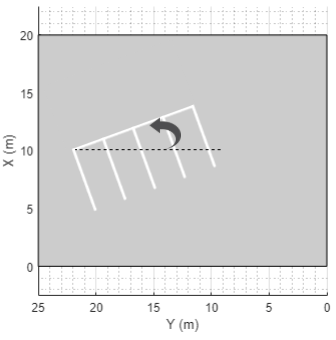
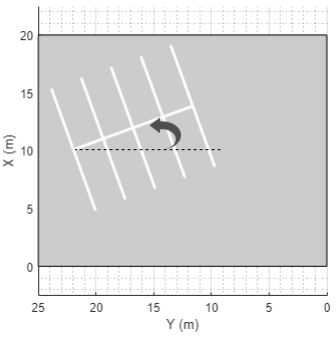
insertParkingSpaces(lot,space,Orientation=45,Position=[50 35]) вставляет сетку парковки в углу в 45 градусов в положении (50, 35) в метрах от источника сценария.Orientation — Ориентация парковки сетки (градус)Ориентация сетки парковки, в градусах в виде неотрицательного действительного скаляра. Ориентация измеряется против часовой стрелки относительно горизонтальной оси сетки парковки.
Для сеток парковки одной строки (Rows=1
Для сеток парковки 2D строки (Rows=2
Таблица показывает демонстрационные ориентации для одной строки и сеток парковки 2D строки.
| Ориентация (сетка парковки одной строки) | Ориентация (сетка парковки 2D строки) |
|---|---|
|
|
|
Чтобы использовать этот аргумент, необходимо задать position аргумент.
Offset — Смещение парковки сетки от ребер (m)Смещение сетки парковки от ребер, в метрах в виде неотрицательного действительного скаляра. Offset относительно первой вершины каждого заданного ребра. То же смещение применяется ко всем ребрам.
Чтобы использовать этот аргумент, необходимо задать edge аргумент.