Используйте эти шаги, чтобы спроектировать алгоритм регулировки скорости:
Создайте подсистему контроллера скорости. Подсистема токового контроллера, что вы создали более раннее использование Iq_ref текущая производительность подсистемы контроллера скорости как вход.
Чтобы создать подсистему контроллера скорости, откройте Simulink® Браузер библиотеки и выбор блок Discrete PI Controller with anti-windup & reset из Motor Control Blockset/Controls/Controllers библиотека.
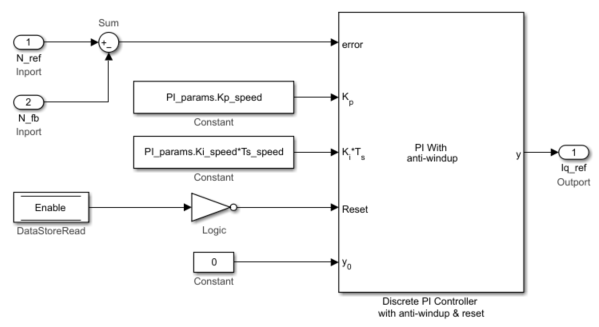
MATLAB® функциональный mcb.internal.SetControllerParameters (в скрипте инициализации модели), вычисляет усиления управления PI для d - ось и q - токовый контроллер оси и контроллер скорости. Для получения дополнительной информации о вычислении усилений контроллера, смотрите Оценочные Усиления Управления от Параметров двигателя. Например, смотрите файл скрипта инициализации модели mcb_pmsm_foc_qep_f28379d_data.m (используемый в примере, Ориентированном на поле на Управление PMSM Используя Квадратурный Энкодер), который использует время выборки (Ts_speed) 500 μs. Опционально, можно использовать
блок Enable Data-Store Memory, чтобы сбросить контроллер.
Создайте подсистему для контроллера скорости и добавьте блоки Rate Transition (от Simulink/Signal Attributes библиотека) к подсистеме вводит с шагом расчета Ts_speed (время выполнения цикла регулировки скорости).
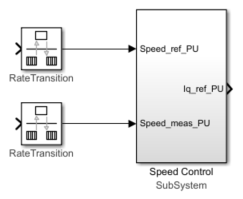
Интегрируйте подсистему контроллера скорости (что вы создали на шаге 2) с интегрированным токовым контроллером и подсистемами модели объекта управления. Соедините выходной порт Iq_ref_PU подсистемы контроллера скорости к входному порту подсистемы токового контроллера через блок Rate Transition. Блок Rate Transition необходим, потому что эти два порта выполняются на уровне различных частот дискретизации. Этот рисунок показывает пример установок параметров блока Rate Transition, соединенного с контроллером скорости и подсистемами токового контроллера.
![]()
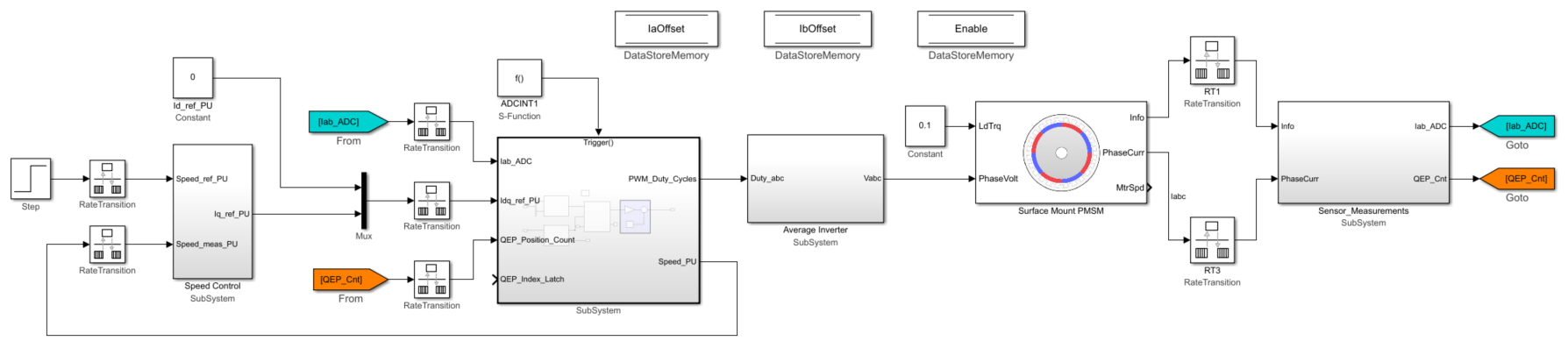
Этот рисунок показывает интегрированному контроллеру скорости, токовому контроллеру и подсистемам модели объекта управления.