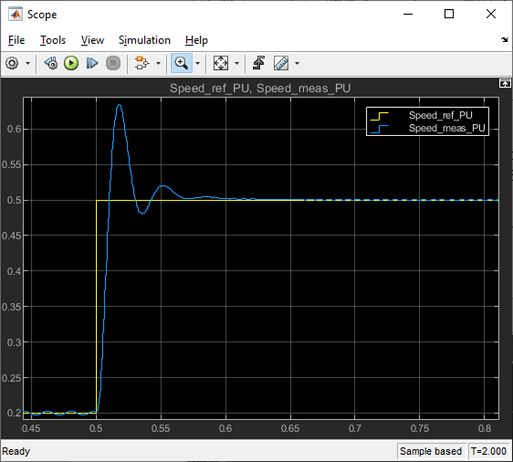
Чтобы вручную настроить подсистему контроллера скорости, обеспечьте вход шага (в области значений 0.2 к 0.5 PU) к Speed_ref_PU введите в подсистеме контроллера скорости (Регулировка скорости). Контролируйте измеренный переходной процесс скорости Speed_meas_PU и настройте параметры подсистемы контроллера скорости, чтобы достигнуть ваших целей управления.
Этот рисунок показывает переходной процесс контроллера скорости.
Эта процедура показывает метод, чтобы реализовать регулировку скорости для PMSM в симуляции. Запустите симуляцию и анализируйте эффективность контроллера.
Можно сгенерировать код С от этого алгоритма управления с помощью Embedded Coder®. Кроме того, можно развернуть этот код и драйверы оборудования к целевому компьютеру.
