Используйте эти шаги, чтобы спроектировать ток и подсистемы масштабирования положения:
Создайте текущую подсистему масштабирования.
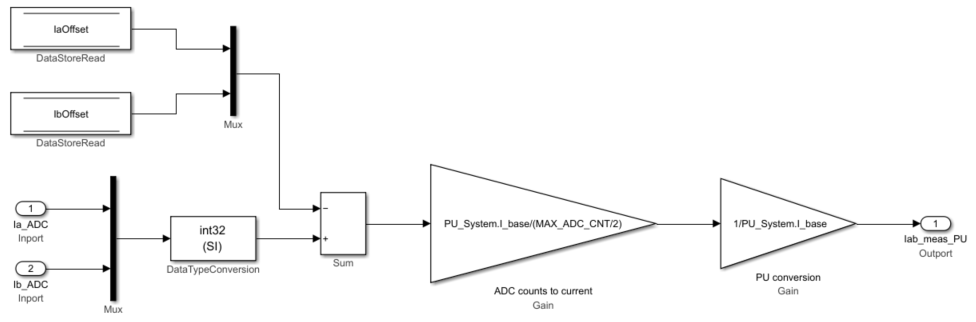
Эта подсистема читает, ток в ADC считает и преобразует ее в значения на модуль (PU).
В этой подсистеме IaOffset и IbOffset
блоки Data Store Memory являются смещениями ADC для текущего измерения, и они - конкретное оборудование. Файл mcb_SetInverterParameters.m содержит смещение ADC по умолчанию (CtSensAOffset и CtSensBOffset) для немногих коммерчески доступных инверторов. Для получения дополнительной информации о ADC возмещает калибровку в оборудовании, видят Запуск 3-фазовые электродвигатели переменного тока в Регулировании без обратной связи и Калибруют Смещение ADC.
В этой подсистеме моторная фаза, текущая измеренный в количествах ADC, преобразована в ток в PU. PU_System.I_base значение относится к базовому току в этой подсистеме. Для получения дополнительной информации о системе PU, смотрите систему в относительных единицах. Смотрите mcb_SetPUSystem.m файл, который вычисляет значения PU для системы.
Можно использовать базовые значения для вычисления реальных значений от на модуль. Чтобы реализовать реальные значения или значения единицы СИ, см. модель mcb_pmsm_foc_qep_f28379d_SIUnit используемый в примере, Ориентированном на поле на Управление PMSM Используя единицы СИ.
IaOffset и IbOffset блоки Data Store Memory используются, чтобы осуществлять обмен данными между текущими подсистемами и подсистемами положения.
Создайте подсистему масштабирования положения.
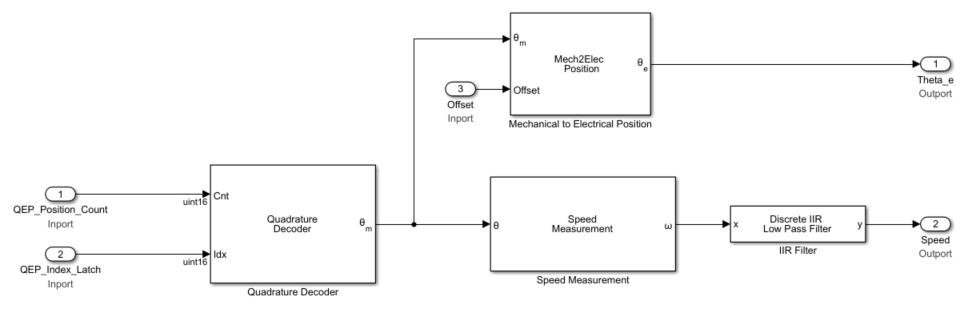
Эта подсистема читает положение ротора из импульсного количества QEP.
В этой подсистеме блок Quadrature Decoder читает количество положения из блока драйвера оборудования или модели объекта управления. Блок преобразует положение механического устройства ротора в количествах положения энкодера к углу механического устройства ротора в PU (0-1).
Блок Mechanical to Electrical Position (Mech2Elec Position) настраивает угол механического устройства ротора для смещения QEP и преобразует его в электрический угол. Для алгоритма FOC нужен ротор электрический угол, чтобы запустить двигатель. Чтобы вычислить смещение энкодера QEP, смотрите Квадратурную Калибровку Смещения Энкодера для Двигателя PMSM.
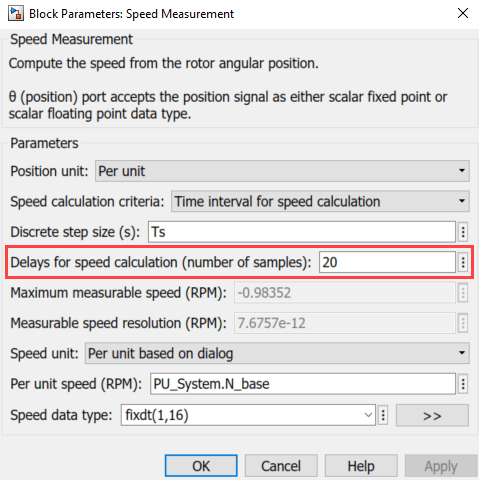
Блок Speed Measurement вычисляет скорость от положения ротора. В диалоговом окне параметров блоков Speed Measurement, установленном параметр Delays for speed calculation (number of samples) на 20. Мы выбрали значение 20 в этом рабочем процессе так, чтобы блок мог измерить максимальную скорость двигателя, который находится под тестом. Блок Speed Measurement выводит скорость в PU.
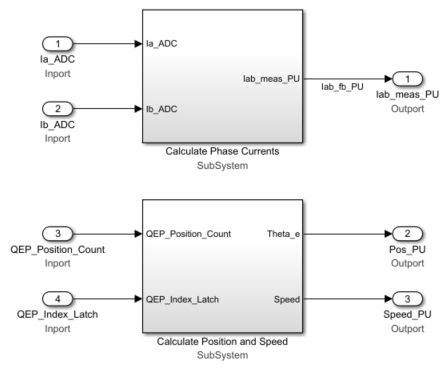
Получившиеся две подсистемы (Вычисляют Токи Фазы и Вычисляют Положение и Скорость), содержат текущее масштабирование и логику декодирования положения.