Решатель программирования конуса второго порядка
coneprog функция является решателем программирования конуса второго порядка, который находит минимум проблемы заданным
удовлетворяющее ограничениям
f, x, b, beq, lb и ub являются векторами, и A и Aeq являются матрицами. Для каждого i, матричный кв/см A (i), векторы кв/см d (i) и кв/см b (i) и скалярный γ (i) находится в коническом ограничении второго порядка, что вы создаете использование secondordercone.
Для получения дополнительной информации о конических ограничениях, смотрите Коническое Ограничение Второго порядка.
x = coneprog(f,socConstraints)socConstraints закодированный как
Кв/см A (i) = socConstraints(i).A
Кв/см b (i) = socConstraints(i).b
Кв/см d (i) = socConstraints(i).d
γ (i) = socConstraints(i).gamma
Почему ограничение
названный коническим ограничением второго порядка? Считайте конус в трехмерном пространстве с эллиптическими поперечными сечениями в x-y плоскостью и диаметром пропорциональный координате z. Координата y имеет шкалу ½, и координата x имеет шкалу 1. Неравенство, задающее внутреннюю часть этого конуса с его точкой в [0,0,0],
В coneprog синтаксис, этот конус имеет следующие аргументы.
A = diag([1 1/2 0]); b = [0;0;0]; d = [0;0;1]; gamma = 0;
Постройте контур конуса.
[X,Y] = meshgrid(-2:0.1:2); Z = sqrt(X.^2 + Y.^2/4); surf(X,Y,Z) view(8,2) xlabel 'x' ylabel 'y' zlabel 'z'
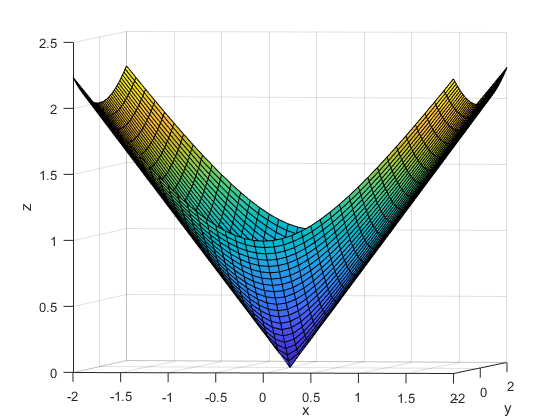
b и gamma аргументы перемещают конус. A и d аргументы вращают конус и изменяют его форму.
Алгоритм использует метод внутренней точки. Для получения дополнительной информации смотрите, что Конус Второго порядка Программирует Алгоритм.
Оптимизировать задача Live Editor обеспечивает визуальный интерфейс для coneprog.
linprog | quadprog | secondordercone | SecondOrderConeConstraint | Оптимизировать
