Создайте комплексные 2D конфигурации путем рисования, перекрывшись и вращая основные формы
Приложение PDE Modeler обеспечивает интерактивный интерфейс для того, чтобы решить 2D задачи геометрии. Используя приложение, можно создать сложные геометрии путем рисования, перекрывшись и вращая основные формы, такие как круги, многоугольники и так далее. Приложение также включает предварительно установленные режимы для приложений, таких как электростатика, магнитостатика, теплопередача, и так далее.
При решении задачи УЧП в приложении выполните эти шаги:
Создайте 2D геометрию.
Задайте граничные условия.
Задайте коэффициенты уравнения.
Сгенерируйте mesh.
Задайте параметры для решения УЧП. Набор параметров зависит от типа УЧП. Для параболических и гиперболических УЧП эти параметры включают начальные условия.
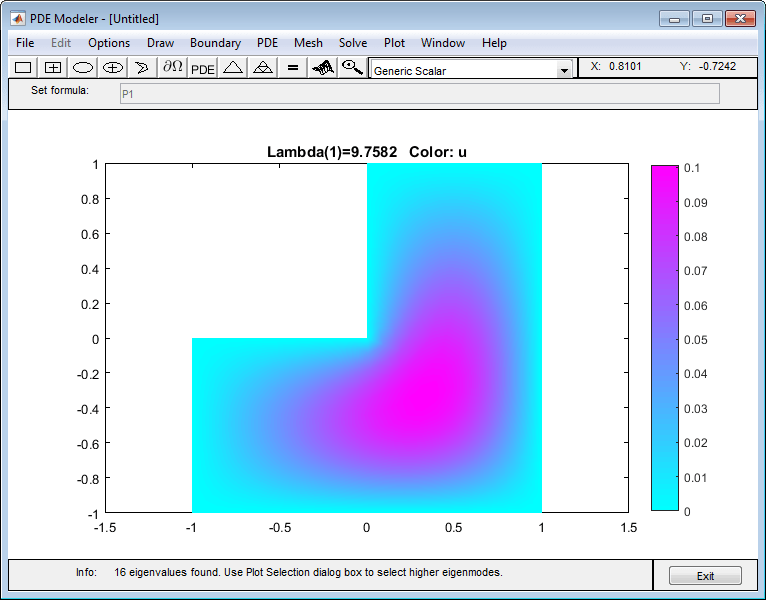
Решите задачу.
Задайте параметры графического вывода и постройте результаты.
Можно принять решение экспортировать данные в MATLAB® рабочая область от любого шага в приложении и продолжает вашу работу вне приложения.
Примечание
Приложение не поддерживает 3-D проблемы геометрии и системы больше чем двух УЧП.
Панель инструментов MATLAB: На вкладке Apps, под Math, Statistics and Optimization, кликают по значку приложения.
Командная строка MATLAB: Войти pdeModeler.
