Вращательная связь между двумя валами автомобильной трансмиссии
Simscape / Автомобильная трансмиссия / Couplings & Drives

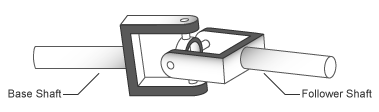
Блок Universal Joint представляет вращательную связь между двумя валами автомобильной трансмиссии. Связывающиеся передачи закручивают между валами, таким образом, они вращаются как модуль при прикладной загрузке. Две вращательных степени свободы, внутренние к связи, позволяют валам соединяться под углом. Этот перекрестный угол варьируется согласно входу физического сигнала от порта A. Дополнительная податливость, смоделированная как параллельный набор пружинного демпфера, позволяет связи деформироваться при загрузке.
Можно использовать блок Universal Joint в качестве связи между двумя вращательными компонентами автомобильной трансмиссии — например, между управлением, и управляемые валы в автомобильном диске обучаются.
Отношение угловых скоростей вала зависит от двух параметров: перекрестный угол между этими двумя валами и углом поворота основного вала. Вход физического сигнала обеспечивает перекрестный угол, в то время как параметр диалогового окна обеспечивает начальный основной угол вала. Эти два угла фиксируют отношение этих двух угловых скоростей вала согласно нелинейному уравнению:
где:
ωF является скоростью вращения вала последователя о его оси длины.
ωB является скоростью вращения основного вала о его оси длины.
θB является углом поворота основного вала о его оси длины.
A является перекрестным углом между основой и валами последователя об основном контакте вала.
Две схематики на рисунке иллюстрирует параметры уравнения. В каждом схематичном, левый вал представляет основной вал, в то время как правильный вал представляет вал последователя. Правильные схематические показы связь, замеченная в левом схематическом после валов, вращают 90 ° о своих осях длины (сегменты пунктирной линии).
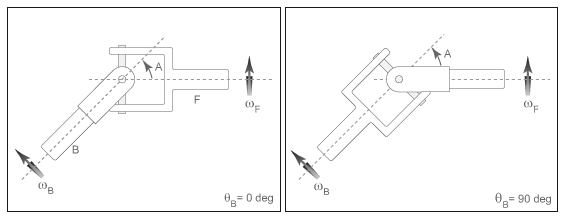
На рисунке перекрестный угол является углом между этими двумя валами о контакте основного вала. Абсолютное значение этого угла должно упасть в области значений 0 ≤ A < Maximum intersection angle. Основной угол вала является углом основного вала о его оси длины. Основной угол вала является также интегралом времени основной угловой скорости вала, ωB.
Belt Drive | Belt Pulley | Chain Drive | Flexible Shaft | Rope Drum
