Подобное автомобилю движение транспортного средства с помощью Акерманна кинематическая модель
Robotics System Toolbox / Мобильные Алгоритмы Робота
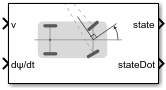
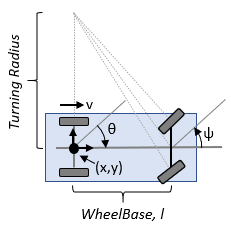
Блок Ackermann Kinematic Model создает подобную автомобилю модель транспортного средства, которая использует Акерманна, держащегося. Эта модель представляет транспортное средство двумя осями, разделенными расстоянием, Wheel base. Состояние транспортного средства задано как четырехэлементный вектор, [x y θ ψ], с глобальным положением xy-, заголовком транспортного средства, θ и регулированием угла, ψ. Заголовок транспортного средства и позиционный xy заданы в центре задней оси. Углы заданы в радианах, и глобальные положения заданы в метрах. Руководящий вход для транспортного средства дан как dψ/dt, в радианах в секунду.
[1] Линчуйте, Кевин М. и Франк К. Парк. Современная Робототехника: Механика, Планирование и Управление. 1-й редактор Кембридж, MA: Издательство Кембриджского университета, 2017.

