Переходной процесс линейной системы вычисляется из нелинейной модели Simulink
Simulink Control Design / Линейные Графики для анализа
Simulink Control Design / Model Verification
Linear Step Response Plot и блоки Check Linear Step Response Characteristics вычисляют линейную систему из нелинейного Simulink® модель и график переходной процесс линейной системы в процессе моделирования. Эти блоки идентичны за исключением настроек по умолчанию на вкладке Bounds.
Linear Step Response Plot не задает границы по умолчанию.
Блок Check Linear Step Response Characteristics задает границы по умолчанию и включает эти границы для утверждения.
Для получения дополнительной информации об анализе области времени линейных систем смотрите Ответы Временного интервала.
В процессе моделирования программное обеспечение линеаризует фрагмент модели между заданными вводами и выводами линеаризации и затем строит переходной процесс линейной системы. Также можно сохранить линейную систему как переменную в MATLAB® рабочая область.
Модель Simulink может быть непрерывной - или дискретное время или многоскоростной и может иметь задержки. Поскольку можно задать только одну пару ввода/вывода линеаризации в этом блоке, линейная система является Одно Входом Одно Выходом (SISO).
Можно задать границы переходного процесса и просмотреть их на графике. Можно также проверять, что границам удовлетворяют в процессе моделирования:
Если всем границам удовлетворяют, блок ничего не делает.
Если связанному не удовлетворяют, блок утверждает, и предупреждающее сообщение появляется в командном окне MATLAB. Можно также указать что блок:
Выполните выражение MATLAB.
Остановите симуляцию и подчеркните тот блок.
В процессе моделирования блок может также вывести логический сигнал утверждения.
Если всем границам удовлетворяют, сигнал верен (1).
Если кому-либо связанному не удовлетворяют, сигнал является ложным (0).
Чтобы вычислить и построить переходной процесс различных фрагментов вашей модели, можно добавить несколько блоки Check Linear Step Response Characteristics и Linear Step Response Plot.
Эти блоки не поддерживают генерацию кода и могут использоваться только в Normal режим симуляции.
Trigger — Внешний триггерный сигналИспользуйте этот входной порт (обозначенный![]() ), чтобы соединить внешний триггерный сигнал для вычисления линеаризации модели. Чтобы задать тип триггерного сигнала обнаружить, используйте параметр Trigger type.
), чтобы соединить внешний триггерный сигнал для вычисления линеаризации модели. Чтобы задать тип триггерного сигнала обнаружить, используйте параметр Trigger type.
Чтобы включить этот порт, установите параметр Linearize on на External trigger.
Show Plot — Открытый графикЧтобы просмотреть запасы по амплитуде и фазе, вычисленные во время симуляции, нажмите эту кнопку прежде, чем запустить симуляцию. Если вы задаете границы на вкладке Bounds, их также показывают на графике.
Чтобы показать график при открытии блока, выберите параметр Show plot on block open.
Для получения дополнительной информации об использовании графика смотрите Используя График.
Show plot on block open — Открытый график при открытии блокаoff (значение по умолчанию) | onВыберите этот параметр, чтобы открыть график при открытии блока. Можно затем выполнить задачи, такие как добавление или изменение границ, в окне графика вместо того, чтобы использовать параметры блоков. Чтобы получить доступ к параметрам блоков из окна графика, выберите Edit или нажатие кнопки![]() .
.
Для получения дополнительной информации об использовании графика смотрите Используя График.
Параметры блоков:
LaunchViewOnOpen |
| Ввод: символьный вектор |
Значение:
'off' | 'on' |
Значение по умолчанию:
'off' |
Response Optimization — Открытый Response OptimizerОткройте приложение Response Optimizer, чтобы оптимизировать ответ модели, чтобы соответствовать конструктивным требованиям, заданным на вкладке Bounds.
Эта кнопка доступна, только если вам установили программное обеспечение Simulink Design Optimization™.
Для получения дополнительной информации об оптимизации ответа смотрите Оптимизацию Проекта, чтобы Удовлетворить Требования Переходного процесса (графический интерфейс пользователя) (Simulink Design Optimization) и Оптимизация Проекта, чтобы Удовлетворить Требования Временного интервала и Частотного диапазона (графический интерфейс пользователя) (Simulink Design Optimization).
Чтобы задать фрагмент модели, чтобы линеаризовать и другие настройки линеаризации, используйте параметры на вкладке Linearizations. Настройки по умолчанию на этой вкладке являются тем же самым для блоков Check Linear Step Response Characteristics и Linear Step Response Plot.
Linearization inputs/outputs — Задайте фрагмент модели, чтобы линеаризоватьЧтобы задать фрагмент модели, чтобы линеаризовать, выберите сигналы из модели Simulink и добавьте их как вводы или выводы линеаризации.
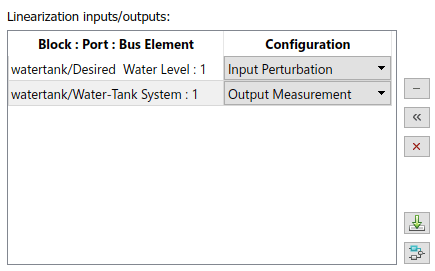
В таблице столбец Block:Port:Bus Element показывает следующую информацию для каждого сигнала.
Исходный блок
Выходной порт исходного блока, с которым соединяется сигнал
Соедините шиной имя элемента (если сигнал находится в шине),
В столбце Configuration выберите тип линейной аналитической точки от следующих типов. Для получения дополнительной информации о линейных аналитических точках смотрите, Задают Фрагмент Модели, чтобы Линеаризовать.
Open-loop Input — Задает точку ввода линеаризации после открытия цикла
Open-loop Output — Задает выходную точку линеаризации перед открытием цикла
Loop Transfer — Задает выходную точку перед открытием цикла, сопровождаемым входом
Input Perturbation — Задает аддитивный вход к сигналу
Output Measurement — Проводит измерения в сигнале
Loop Break — Задает открытие цикла
Sensitivity — Задает аддитивный вход, сопровождаемый выходным измерением
Complementary Sensitivity — Задает выход, сопровождаемый аддитивным входом
Примечание
Если вы симулируете модель, не задавая ввод или вывод линеаризации, программное обеспечение генерирует предупреждение в командном окне MATLAB и не вычисляет линейную систему.
Добавить вводы и выводы линеаризации:
Чтобы расширить область выбора сигнала, щелкнуть![]() .
.
Диалоговое окно расширяется, чтобы отобразить область Click a signal in the model to select it.
В модели Simulink выберите один или несколько сигналов.
Выбранные сигналы появляются в таблице Model signal.
(Необязательно) Для сигналов шины, расширьте шину, чтобы выбрать отдельные элементы.
Совет
Для больших шин или других больших списков сигналов, можно отфильтровать имена сигнала. В поле Filter by name введите искомый текст. Соответствие имени является чувствительным к регистру.
Чтобы изменить опции фильтрации, щелкнуть![]() . Для получения дополнительной информации о фильтрации опций смотрите параметры Show filtered results as a flat list и Enable regular expression.
. Для получения дополнительной информации о фильтрации опций смотрите параметры Show filtered results as a flat list и Enable regular expression.
Чтобы добавить выбранный сигнал в таблицу Linearization inputs/outputs, щелкнуть![]() .
.
В столбце Configuration задайте тип сигнала.
В качестве альтернативы, если вам задали вводы и выводы линеаризации в вашей модели, можно добавить их в таблицу Linearization inputs/outputs путем нажатия![]() .
.
Чтобы удалить сигнал из таблицы Linearization inputs/outputs, выберите сигнал и нажатие кнопки![]() .
.
Чтобы подсветить исходный блок сигнала в модели Simulink, выберите сигнал в таблице Linearization inputs/outputs и нажатии кнопки![]() .
.
Enable regular expression — Включите поиск в сигнале с помощью регулярных выраженийon (значение по умолчанию) | offВыберите эту опцию, чтобы включить использование регулярных выражений MATLAB для фильтрации имен сигнала. Например, ввод t$ в Filter by name текстовое поле отображает все сигналы, имена которых заканчиваются строчным t (и их непосредственные родители). Для получения дополнительной информации смотрите Регулярные выражения.
Чтобы включить этот параметр, щелкните![]() рядом с текстовым полем Filter by name.
рядом с текстовым полем Filter by name.
Show filtered results as a flat list — Отобразите отфильтрованную иерархию сигнала шины с помощью плоского спискаoff (значение по умолчанию) | onВыберите эту опцию, чтобы отобразить список отфильтрованных сигналов в плоском формате списка. Плоский формат списка использует запись через точку, чтобы отразить иерархию сигналов шины. Сигналы отфильтрованы на основе текста в текстовом поле Filter by name.
Следующий рисунок показывает пример плоского формата списка для отфильтрованного набора вложенных сигналов шины.

Чтобы включить этот параметр, щелкните![]() рядом с текстовым полем Filter by name.
рядом с текстовым полем Filter by name.
Linearize on — Когда вычислить линейную модельSimulation snapshots (значение по умолчанию) | External triggerИспользуйте этот параметр, чтобы задать, когда это необходимо, чтобы вычислить линейную модель.
Чтобы вычислить линейные модели в заданные времена снимка состояния симуляции, установите этот параметр на Simulation snapshots. Задайте времена снимка состояния с помощью параметра Snapshot times.
Используйте снимки состояния симуляции когда вы:
Знайте один или несколько раз, когда модель будет в установившейся рабочей точке
Хочу вычислить линейные системы в конкретные моменты времени
Чтобы вычислить линейные модели в основанных на триггере событиях симуляции, установите этот параметр на External trigger. Выбирание этой опции добавляет триггерный входной порт в блок, с которым вы соединяете свой внешний триггерный сигнал. Чтобы задать тип триггера, чтобы обнаружить, используйте параметр Trigger type.
Используйте внешний триггер, когда сигнал, сгенерированный в процессе моделирования, указывает, что модель при установившемся условии интереса. Например, для модели самолета, вы можете хотеть вычислить линейную систему каждый раз, когда топливная масса является данной частью максимальной топливной массы.
Параметры блоков:
LinearizeAt |
| Ввод: символьный вектор |
Значение:
'SnapshotTimes' | 'ExternalTrigger' |
Значение по умолчанию:
'SnapshotTimes' |
Snapshot times — Времена симуляции, в которых можно вычислить линейную модельЧтобы вычислить линейную систему в определенных временах симуляции, таких как время, когда вы знаете, модель достигает рабочей точки устойчивого состояния, задайте один или несколько раз снимка состояния. Чтобы задать несколько раз снимка состояния, задайте этот параметр как вектор из положительных значений.
Времена снимка состояния должны быть меньше чем или равны времени симуляции, заданному в модели Simulink.
Для примеров линеаризации модели во времена снимка состояния симуляции см.:
Чтобы включить этот параметр, установите параметр Linearize on на Simulation snapshots
Параметры блоков:
SnapshotTimes |
| Ввод: символьный вектор |
Значение:
'0' | положительное вещественное значение | вектор из положительных вещественных значений |
Значение по умолчанию:
'0' |
Trigger type — Тип внешнего триггера, чтобы обнаружитьRising edge (значение по умолчанию) | Falling edgeЗадайте триггер, чтобы обнаружить во внешнем триггерном сигнале как один из следующих типов.
Rising edge — Используйте возрастающее ребро триггерного сигнала; то есть, когда сигнал изменяется от 0 к 1.
Falling edge — Используйте падающее ребро триггерного сигнала; то есть, когда сигнал изменяется от 1 к 0.
Чтобы включить этот параметр, установите параметр Linearize on на External trigger.
Параметры блоков: TriggerType |
| Ввод: символьный вектор |
Значение: 'rising' | 'falling' |
Значение по умолчанию: 'rising' |
Enable zero-crossing detection — Включите обнаружение пересечения нулемon (значение по умолчанию) | offВыберите эту опцию, чтобы включить обнаружение пересечения нулем.
Когда вы устанавливаете параметр Linearize on на Simulation snapshots, включение обнаружения пересечения нулем гарантирует, что программное обеспечение вычисляет линейную модель в точные времена снимка состояния, которые вы задаете в параметре Snapshot times.
Когда вы устанавливаете параметр Linearize on на External trigger, включение обнаружения пересечения нулем гарантирует, что программное обеспечение вычисляет линейную модель в точное время, когда внешний триггер обнаруживается. Чтобы задать тип триггера, используйте параметр Trigger type.
Если вы очищаете эту опцию, программное обеспечение вычисляет линейную систему во временах симуляции, выбранных переменным шагом решатель Simulink, который не может соответствовать точному времени снимка состояния или точному времени, когда триггерный сигнал обнаруживается.
Например, рассмотрите случай, где решатель переменного шага выбирает времена симуляции T n –1 и Tn. Как показано в следующем рисунке заданное время снимка состояния Tsnap может быть между выбранными временами симуляции. Если вы включаете обнаружение пересечения нулем, решатель также симулирует модель во время Tsnap и вычисляет линейную модель в этой точке.
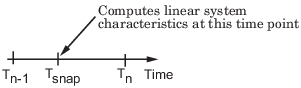
Точно так же внешний триггер может быть обнаружен во время Ttrig, который является между выбранными временами симуляции. Если вы включаете обнаружение пересечения нулем, решатель также симулирует модель во время Ttrig и вычисляет линейную модель в этой точке.

В обоих случаях, если вы не включаете обнаружение пересечения нулем, программное обеспечение вычисляет линейную модель или в T n –1 или в Tn.
Для получения дополнительной информации об обнаружении пересечения нулем смотрите Обнаружение Пересечения нулем.
Этот параметр проигнорирован, когда вы используете фиксированный шаг решатель Simulink.
Параметры блоков: ZeroCross |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'on' |
Use exact delays — Используйте точные задержки линейной моделиoff (значение по умолчанию) | onВыберите эту опцию, чтобы вычислить линейную модель с точными задержками. Если вы очищаете эту опцию, линейная модель использует приближения Padé любых задержек.
Для получения дополнительной информации о линеаризации моделей с задержками смотрите, Линеаризуют Модели с Задержками.
Параметры блоков: UseExactDelayModel |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Linear system sample time — Шаг расчета линейной системы'auto' (значение по умолчанию) | положительное конечное значение | 0Чтобы вычислить линейную систему с заданным шагом расчета, шагами расчета убежищ программного обеспечения в модели с помощью метода, вы задаете в параметре Sample time rate conversion method.
Можно установить шаг расчета на одно из следующих значений.
auto — Если все блоки в модели являются непрерывным временем, используйте шаг расчета 0. В противном случае установите шаг расчета на наименьшее общее кратное ненулевых шагов расчета в модели.
Положительное конечное значение — Создает модель дискретного времени с заданным шагом расчета
0 — Создайте модель непрерывного времени
Параметры блоков:
SampleTime |
| Ввод: символьный вектор |
Значение:
'auto' | положительное конечное значение | '0' |
Значение по умолчанию:
'auto' |
Sample time rate conversion method — Метод преобразования уровняZero-Order Hold (значение по умолчанию) | Tustin (bilinear) | Tustin with Prewarping | ...Метод для преобразования шагов расчета во время линеаризации в виде одного из следующих значений.
Zero-Order Hold — Нулевой порядок содержит, где входные параметры управления приняты кусочная константа по шагу расчета Ts. Этот метод обычно выполняет лучше во временном интервале.
Tustin (bilinear) — Билинейный (Тастин) приближение без предварительного деформирования частоты. Программное обеспечение округляет дробные задержки до самого близкого кратного время выборки. Этот метод обычно выполняет лучше в частотном диапазоне.
Tustin with Prewarping — Билинейный (Тастин) приближение с предварительным деформированием частоты. Задайте частоту перед деформацией с помощью параметра Prewarp frequency. Этот метод обычно выполняет лучше в частотном диапазоне. Используйте этот метод, чтобы гарантировать соответствие в необходимой области частоты.
Upsampling when possible, Zero-Order Hold otherwise — Сверхдискретизируйте систему дискретного времени когда возможный; в противном случае используйте нулевой порядок, содержат.
Upsampling when possible, Tustin otherwise — Сверхдискретизируйте систему дискретного времени когда возможный; в противном случае используйте приближение Тастина.
Upsampling when possible, Tustin with Prewarping otherwise — Сверхдискретизируйте систему дискретного времени когда возможный; в противном случае используйте приближение Тастина с предварительным деформированием частоты.
Можно сверхдискретизировать только, когда вы преобразуете систему дискретного времени в новый более быстрый шаг расчета, который является целочисленным кратным шаг расчета исходной системы.
Для получения дополнительной информации о преобразовании уровня и линеаризации многоскоростных моделей, см.:
Примечание
Если вы используете метод преобразования уровня кроме Zero-Order Hold, конвертированные состояния больше не имеют тот же физический смысл как исходные состояния. В результате имена состояния в получившейся системе LTI превращаются в '?'.
Чтобы включить этот параметр, установите параметр Linear system sample time на значение кроме auto.
Параметры блоков: RateConversionMethod |
| Ввод: символьный вектор |
Значение: 'zoh' | 'tustin' | 'prewarp'| 'upsampling_zoh'| 'upsampling_tustin'| 'upsampling_prewarp' |
Значение по умолчанию: 'zoh' |
Prewarp frequency — Предварительно деформируйте частоту для преобразования уровня ТастинаПредварительно деформируйте частоту для преобразования уровня Тастина в радианах в секунду в виде скалярного значения меньше, чем частота Найквиста до и после передискретизации.
Чтобы включить этот параметр, установите параметр Sample time rate conversion method на одно из следующих значений.
Tustin with Prewarping
Upsampling when possible, Tustin with Prewarping otherwise
Параметры блоков: PreWarpFreq |
| Ввод: символьный вектор |
| Значение: положительная скалярная величина |
Значение по умолчанию: '10' |
Use full block names — Используйте полный блок path в состоянии, введите и выведите именаoff (значение по умолчанию) | onЧтобы показать состояние, введите, и выведите имена вычисленной линейной системы с помощью их полного блока path, выберите этот параметр. Например, в scdcstr модель, состояние в Integrator1 блок CSTR подсистема появляется со своим полным блоком path как scdcstr/CSTR/Integrator1.
Если вы очищаете этот параметр, только имена состояний, входных параметров, и выходные параметры используются, который полезен, когда имена сигнала уникальны, и вы знаете их местоположения в своей модели Simulink. В предыдущем примере имя состояния блока интегратора появляется как Integrator1.
Вычисленная линейная система является объектом пространства состояний (ss). Состояние, вход и выходные имена для системы появляются в следующих свойствах объектов пространства состояний.
| Введите, Выход или имя состояния | Свойство объекта пространства состояний |
|---|---|
| Имена входа Linearization | InputName |
| Linearization имена выхода | OutputName |
| Имена состояния | StateName |
Параметры блоков: UseFullBlockNameLabels |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Use bus signal names — Используйте имена сигнала шины в линейной системеoff (значение по умолчанию) | onКогда вы выберете целую шину как ввод или вывод линеаризации, выберите этот параметр, чтобы использовать имена сигнала отдельных элементов шины в вычисленной линейной системе. Если вы не включаете эту опцию, номера каналов шины используются вместо этого.
Примечание
Выбор целого сигнала шины не рекомендуется. Вместо этого выберите отдельные элементы шины.
Имена шины сигнала появляются, когда ввод или вывод линеаризации от одного из следующих блоков.
Блок импорта корневого уровня, содержащий объект шины
Соедините шиной блок создателя
Блок Subsystem, источник которого прослеживает до выхода блока создателя шины
Блок Subsystem, источник которого прослеживает до импорта корневого уровня путем прохождения только через виртуальные или невиртуальные контуры подсистемы
Используя этот параметр не поддерживается, когда ваша модель содержит смеси мультиплексора/шины.
Параметры блоков: UseBusSignalLabels |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Чтобы задать границы на характеристиках переходного процесса и задать, проверять ли на нарушения этих границ, используйте параметры на вкладке Bounds. Настройки по умолчанию на этой вкладке отличаются для блоков Check Linear Step Response Characteristics и Linear Step Response Plot.
Include step response bound in assertion — Проверяйте, нарушает ли переходной процесс границы на характеристикахon | offВыберите этот параметр, чтобы проверять, нарушают ли характеристики переходного процесса границы, заданные на вкладке Bounds.
По умолчанию этот параметр очищен для блока Linear Step Response Plot и выбран для блока Check Linear Step Response Characteristics.
Этот параметр используется для утверждения, только если вы выбираете параметр Enable assertion.
Параметры блоков:
EnableStepResponseBound |
| Ввод: символьный вектор |
Значение:
'on' | 'off' |
Значение по умолчанию:
'off' для блока Linear Step Response Plot, 'on' для блока Check Linear Step Response Characteristics |
Final value — Окончательное значение выходного сигнала в ответ на шаг вводитсяЧтобы вычислить другие характеристики переходного процесса на вкладке Bounds, блок использует ожидаемое окончательное значение выходного сигнала в ответ на вход шага.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 1 для блока Check Linear Step Response Characteristics.
Параметры блоков:
FinalValue |
| Ввод: символьный вектор |
| Значение: конечный действительный скаляр |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '1' для блока Check Linear Step Response Characteristics |
Rise time — Верхняя граница на времени нарастанияВерхняя граница на времени в секундах для переходного процесса, чтобы достигнуть процента окончательного значения.
Чтобы задать окончательное значение, используйте параметр Final value.
Чтобы задать процент окончательного значения, используйте параметр % Rise.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 5 для блока Check Linear Step Response Characteristics.
Параметры блоков:
RiseTime |
| Ввод: символьный вектор |
| Значение: конечная положительная скалярная величина |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '5' для блока Check Linear Step Response Characteristics |
% Rise — Процент окончательного значения используемое в вычислениях время нарастанияПроцент окончательного значения раньше задавал связанное время нарастания.
Чтобы задать окончательное значение, используйте параметр Final value.
Чтобы задать связанное время нарастания, используйте параметр Rise time.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 80 для блока Check Linear Step Response Characteristics.
Параметры блоков:
PercentRise |
| Ввод: символьный вектор |
| Значение: положительная скалярная величина меньше, чем (100 - Урегулирование %) |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '80' для блока Check Linear Step Response Characteristics |
Settling time — Верхняя граница на времени урегулированияВерхняя граница на времени в секундах для переходного процесса, чтобы обосноваться в заданной области вокруг окончательного значения. Эта область значений урегулирования задана как окончательное значение плюс или минус заданный процентный коридор окончательного значения.
Чтобы задать окончательное значение, используйте параметр Final value.
Чтобы задать процентный коридор, используйте параметр % Settling.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 7 для блока Check Linear Step Response Characteristics.
Параметры блоков:
SettlingTime |
| Ввод: символьный вектор |
| Значение: конечный скаляр, больше, чем время нарастания |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '7' для блока Check Linear Step Response Characteristics |
% Settling — Процент окончательного значения используемая в вычислениях область значений урегулированияПроцент окончательного значения раньше задавал обосновывающиеся границы области значений. Обосновывающаяся область значений задана как окончательное значение плюс или минус заданный процентный коридор окончательного значения.
Чтобы задать окончательное значение, используйте параметр Final value.
Чтобы задать связанное время урегулирования, используйте параметр Settling time.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 1 для блока Check Linear Step Response Characteristics.
Параметры блоков:
PercentSettling |
| Ввод: символьный вектор |
| Значение: положительная скалярная величина меньше, чем (100 - Урегулирование %) |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '1' для блока Check Linear Step Response Characteristics |
% Overshoot — Верхняя граница на перерегулированииСумма, которой переходной процесс может превысить окончательное значение, заданное как процент окончательного значения. Чтобы задать окончательное значение, используйте параметр Final value.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 10 для блока Check Linear Step Response Characteristics.
Параметры блоков:
PercentOvershoot |
| Ввод: символьный вектор |
| Значение: скаляр между 0 и 100 |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '10' для блока Check Linear Step Response Characteristics |
% Undershoot — Верхняя граница на перерегулированииСумма, которой переходной процесс может недостаточно подняться начальное значение, заданное как процент окончательного значения. Чтобы задать окончательное значение, используйте параметр Final value.
По умолчанию этим параметром является [] для блока Linear Step Response Plot и 1 для блока Check Linear Step Response Characteristics.
Параметры блоков:
PercentUndershoot |
| Ввод: символьный вектор |
| Значение: скаляр между 0 и 100 |
Значение по умолчанию:
'[]' для блока Linear Step Response Plot, '1' для блока Check Linear Step Response Characteristics |
Чтобы управлять, сохранены ли результаты линеаризации, вычисленные во время симуляции, используйте параметры на вкладке Logging. Настройки по умолчанию на этой вкладке являются тем же самым для блоков Check Linear Step Response Characteristics и Linear Step Response Plot.
Save data to workspace — Сохраните линейные системы для последующего анализаoff (значение по умолчанию) | onВыберите этот параметр, чтобы сохранить вычисленные линейные системы для последующего анализа или системы управления. Данные сохранены в структуре со следующими полями.
time — Времена симуляции, в которых вычисляются линейные системы.
values — Модель в пространстве состояний, представляющая линейную систему. Если линейная система вычисляется в нескольких временах симуляции, values массив моделей в пространстве состояний.
operatingPoints — Рабочие точки, соответствующие каждой линейной системе в values. Чтобы включить это поле, выберите параметр Save operating points for each linearization.
Чтобы задать имя сохраненной структуры данных, используйте свойство Variable name.
Местоположение сохраненной структуры данных зависит от настройки модели Simulink.
Если модель не сконфигурирована, чтобы сохранить симуляцию выход как отдельный объект, структура данных является переменной в рабочем пространстве MATLAB.
Если модель сконфигурирована, чтобы сохранить симуляцию выход как отдельный объект, структура данных является полем в Simulink.SimulationOutput объект, который содержит регистрируемые данные моделирования.
Чтобы сконфигурировать вашу модель, чтобы сохранить симуляцию выход в отдельном объекте, в диалоговом окне Configuration Parameters, выбирают параметр Single simulation output.
Для получения дополнительной информации о регистрации данных в Simulink, смотрите Данные моделирования Экспорта и Simulink.SimulationOutput страница с описанием.
Параметры блоков: SaveToWorkspace |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Variable name — Имя структуры данных для сохранения линейных системsys (значение по умолчанию) | вектор символовЗадайте имя структуры данных, которая хранит линейные системы, вычисленные в процессе моделирования.
Имя должно быть уникальным среди имен переменных, используемых во всех блоках модели регистрации данных, таким как Линейные блоки Графика для анализа, блоки Model Verification, блоки Scope, блоки To Workspace и возвращаемые переменные симуляции, такие как время, состояния и выходные параметры.
Для получения дополнительной информации о регистрации данных в Simulink, смотрите Данные моделирования Экспорта и Simulink.SimulationOutput страница с описанием.
Чтобы включить этот параметр, выберите параметр Save data to workspace.
Параметры блоков: SaveName |
| Ввод: символьный вектор |
Значение по умолчанию: 'sys' |
Save operating points for each linearization — Сохраните рабочие точки с линеаризациейoff (значение по умолчанию) | onВыберите этот параметр, чтобы сохранить рабочую точку, в которой вычисляется каждая линеаризация. Выбор этого параметра добавляет operatingPoints поле к сохраненной структуре данных.
Чтобы включить этот параметр, выберите параметр Save data to workspace.
Параметры блоков: SaveOperatingPoints |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Чтобы управлять поведением утверждения блока, когда границы, заданные на вкладке Bounds, будут нарушены, используйте параметры на вкладке Assertion. Настройки по умолчанию на этой вкладке являются тем же самым для блоков Check Linear Step Response Characteristics и Linear Step Response Plot.
Enable assertion — Включите связанную проверкуon (значение по умолчанию) | offЧтобы проверять, удовлетворяют ли границам, заданным на вкладке Bounds, во время симуляции, выберите этот параметр. Когда связанному не удовлетворяют, сбои утверждения и предупреждение сгенерирован.
Очистка этого параметра отключает утверждение; то есть, блок больше не проверяет, что заданным границам удовлетворяют. Значок блока также обновляется, чтобы указать, что утверждение отключено.
По умолчанию, на вкладке Bounds:
Блок Linear Step Response Plot не имеет заданных границ.
Блок Check Linear Step Response Characteristics задал границы.
Можно сконфигурировать модель Simulink, чтобы включить или отключить все блоки верификации модели и заменить параметр Enable assertion. Для этого в модели Simulink, в диалоговом окне Configuration Parameters, задают параметр Model Verification block enabling.
Параметры блоков: enabled |
| Ввод: символьный вектор |
Значение: 'on' | 'off' |
Значение по умолчанию: 'on' |
Simulation callback when assertion fails — Выражение, чтобы оценить, когда границы нарушены'' (значение по умолчанию) | выражение MATLABЗадайте выражение MATLAB, чтобы оценить, когда границы, заданные на вкладке Bounds, будут нарушены. Все переменные, используемые в выражении, должны быть в рабочем пространстве MATLAB.
Чтобы включить этот параметр, выберите параметр Enable assertion.
Параметры блоков: callback |
| Ввод: символьный вектор |
| Значение: Выражение MATLAB |
Значение по умолчанию: '' |
Stop simulation when assertion fails — Остановите симуляцию, когда границы будут нарушеныoff (значение по умолчанию) | onЧтобы остановить симуляцию, когда границы, заданные на вкладке Bounds, будут нарушены, выберите этот параметр. Если вы не выбираете эту опцию, о связанном нарушении сообщают как предупреждение в командном окне MATLAB, и симуляция продолжается.
Если при запуске симуляцию из модели Simulink, когда утверждение перестало работать, блок, где связанное нарушение происходит, подсвечен, и сообщение об ошибке отображено в окне Simulation Diagnostics.
Примечание
Начиная с выбора этой опции останавливает симуляцию, как только утверждение перестало работать, о связанных нарушениях, которые могут произойти позже во время симуляции, не сообщают. Если вы хотите, чтобы все связанные нарушения были сообщены, не выбирайте эту опцию.
Чтобы включить этот параметр, выберите параметр Enable assertion.
Параметры блоков: stopWhenAssertionFail |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
Output assertion signal — Добавьте выходной порт утвержденияoff (значение по умолчанию) | onДобавьте z–1 выходной порт сигнала утверждения с блоком. Это выходы порта значение утверждения как булев сигнал. Когда границы, заданные на вкладке Bounds, нарушены, сбои утверждения и сигнал утверждения 0. В противном случае сигналом утверждения является 1.
Можно использовать сигнал утверждения спроектировать комплексную логику утверждения. Для примера смотрите, Проверяют Модель Используя Simulink Control Design и Блоки Верификации Simulink.
Параметры блоков: export |
| Ввод: символьный вектор |
Значение: 'off' | 'on' |
Значение по умолчанию: 'off' |
В окне графика вы можете:
Просмотрите параметры блоков путем нажатия![]() или выбора Edit.
или выбора Edit.
Подсветите блок в модели путем нажатия![]() или выбора Highlight Simulink Block в меню View.
или выбора Highlight Simulink Block в меню View.
Симулируйте модель путем нажатия![]() .
.
Добавьте легенду в график путем нажатия![]() .
.
Чтобы отобразить характеристики ответа, такие как максимальная чувствительность или время урегулирования, щелкают правой кнопкой по графику. Затем под Characteristics выберите характеристики, чтобы показать.
Границы, которые вы задаете для блока, появляются на графике.
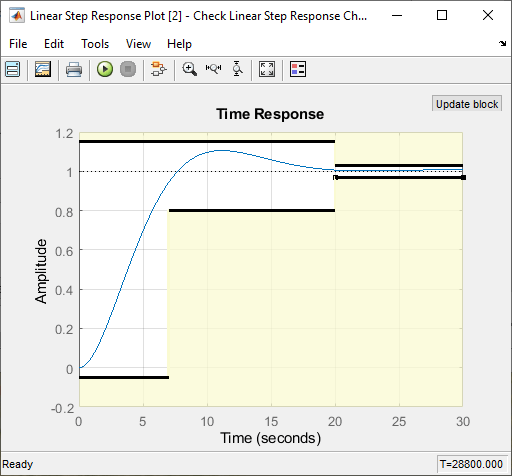
Можно задать границы на вкладке Bounds.
Чтобы изменить связанное, можно перетащить связанное в графике. Вы можете также:
Щелкните правой кнопкой по графику и выберите Bounds> Edit Bound.
Щелкните правой кнопкой по связанному и выберите Edit.
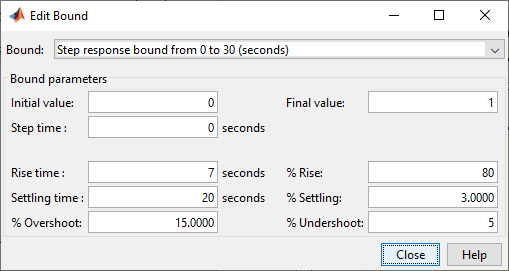
Затем в диалоговом окне Edit Bound задайте значения параметров и нажмите Close.
После редактирования границ из окна графика обновите связанное значение в блоке путем нажатия на Update Block.


