Совершенствуйте положение камеры с помощью корректировки пакета только для движения
refinedPose = bundleAdjustmentMotion(xyzPoints,imagePoints,absolutePose,intrinsics)
Процедура улучшения только для движения является особым случаем алгоритма Levenberg-Marquardt для корректировки пакета с 3-D точками, зафиксированными во время оптимизации. 3-D точки и положение камеры помещаются в ту же систему мировой координаты.
[ дополнительно возвращает N - вектор элемента, содержащий среднюю ошибку перепроекции для каждой 3-D мировой точки с помощью аргументов от предыдущего синтаксиса.refinedPose,reprojectionErrors]
= bundleAdjustmentMotion(___)
[___] = bundleAdjustmentMotion(___, дополнительные опции использования заданы одним или несколькими Name,Value)Name,Value парные аргументы. Незаданные свойства имеют значения по умолчанию.
Загрузите данные для инициализации в рабочую область.
data = load('motionOnlyBA.mat');Совершенствуйте абсолютные положения камеры.
refinedPose = bundleAdjustmentMotion(data.xyzPoints,data.imagePoints,data.absPose,data.intrinsics);
Отобразите 3-D мировые точки.
pcshow(data.xyzPoints,'VerticalAxis','y','VerticalAxisDir','down','MarkerSize',45); hold on
Постройте абсолютные положения камеры до и после улучшения.
plotCamera('AbsolutePose',data.absPose,'Color','r','Size',2); plotCamera('AbsolutePose',refinedPose,'Color','m','Size',2);

refinedPose — Усовершенствованное абсолютное положениеrigid3d объектУсовершенствованное абсолютное положение камеры, возвращенной как rigid3d объект.
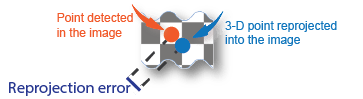
reprojectionErrors — Ошибки перепроекцииОшибки перепроекции, возвращенные как M-elment вектор. Функциональные проекты каждая мировая точка назад в каждую камеру. Затем в каждом изображении, функция вычисляет ошибку перепроекции как расстояние между обнаруженным и повторно спроектированной точкой. reprojectionErrors вектор содержит среднюю ошибку перепроекции для каждой мировой точки.
[1] Lourakis, M.I.A. и А.А. Аргирос. "SBA: пакет программного обеспечения для типовой разреженной корректировки пакета". Транзакции ACM на математическом программном обеспечении. Объем 36, выпуск 1. Март 2009.
[2] Хартли, R. и А. Зиссермен. "Несколько просматривают геометрию в компьютерном зрении". Издательство Кембриджского университета. 2003
[3] Triggs, B., П. Маклочлан, Р. Хартли и А. Фицджиббон. "Свяжите корректировку: современный синтез". Продолжения международного семинара на алгоритмах визуализации: теория и практика. Страницы 298 — 372. Springer-Verlag. 1999.
