Совершенствуйте 3-D точки и положения камеры
[ совершенствовал 3-D точки и положения камеры, чтобы минимизировать ошибки перепроекции. Процедура улучшения является вариантом алгоритма Levenberg-Marquardt. Функция использует ту же глобальную систему координат привязки, чтобы возвратить и 3-D точки и положения камеры.xyzRefinedPoints,refinedPoses]
= bundleAdjustment(xyzPoints,pointTracks,cameraPoses,intrinsics)
[___, возвращает среднюю ошибку перепроекции для каждой 3-D мировой точки, в дополнение к аргументам от предыдущего синтаксиса.reprojectionErrors]
= bundleAdjustment(___)
[___] = bundleAdjustment(___, задает опции с помощью одних или нескольких аргументов name-value. Незаданные аргументы имеют значения по умолчанию.Name,Value)
Загрузите данные для инициализации.
data = load('sfmGlobe');Совершенствуйте положения камеры и точки.
[xyzRefinedPoints,refinedPoses] = ...
bundleAdjustment(data.xyzPoints,data.pointTracks,data.cameraPoses,data.intrinsics);Отобразите усовершенствованные 3-D точки и положения камеры.
pcshow(xyzRefinedPoints,'VerticalAxis','y','VerticalAxisDir', ... 'down','MarkerSize',45) hold on plotCamera(refinedPoses,'Size',0.1) hold off grid on

xyzRefinedPoints — 3-D местоположения усовершенствованных мировых точек3-D местоположения усовершенствованных мировых точек, возвращенных как M-by-3 матрица [x y z] местоположения.
Типы данных: single | double
refinedPoses — Усовершенствованные положения камерыУсовершенствованные положения камеры, возвращенные как таблица с тремя столбцами. Таблица содержит столбцы для ViewId, Orientation, и Location.
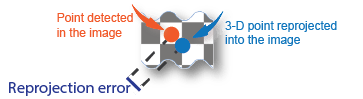
reprojectionErrors — Ошибки перепроекцииОшибки перепроекции, возвращенные как M - вектор элемента. Функциональные проекты каждая мировая точка назад в каждую камеру. Затем в каждом изображении функция вычисляет ошибку перепроекции как расстояние между обнаруженным и повторно спроектированной точкой. reprojectionErrors вектор содержит среднюю ошибку перепроекции для каждой мировой точки.
[1] Lourakis, Мэнолис Ай. А. и Антонис А. Аргирос. "SBA: Пакет программного обеспечения для Типовой Разреженной Корректировки Пакета". Транзакции ACM на Mathematical Software 36, № 1 (март 2009): 2:1–2:30.
[2] Хартли, Ричард и Эндрю Зиссермен. Несколько Геометрия Представления в Компьютерном зрении. 2-й редактор Кембридж, Великобритания ; Нью-Йорк: Издательство Кембриджского университета, 2003.
[3] Triggs, счет, Филип Ф. Маклочлан, Ричард Ай. Хартли и Эндрю В. Фицджиббон. "Свяжите корректировку — современный синтез". В продолжениях международного семинара на алгоритмах визуализации, 298–372. Springer-Verlag, 1999.
bundleAdjustmentMotion | bundleAdjustmentStructure | relativeCameraPose | undistortImage | undistortPoints | cameraMatrix | triangulateMultiview