Укажите два облака точек с помощью алгоритма ICP
tform = pcregistericp(moving,fixed)
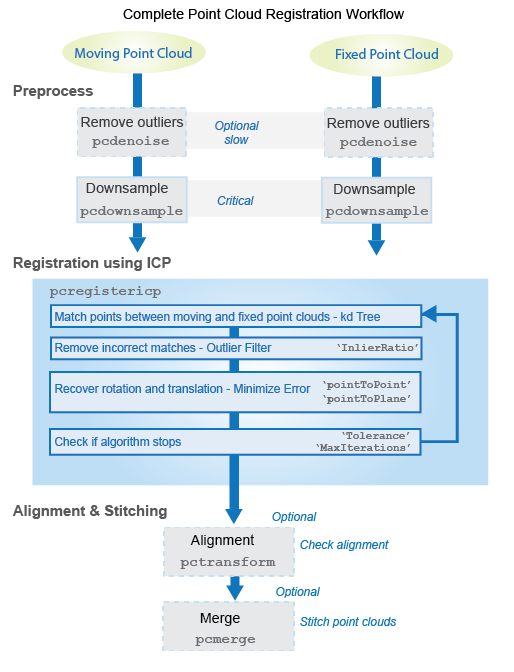
Регистрационный алгоритм основан на "итеративной самой близкой точке" (ICP) алгоритм. Лучшая эффективность этого итеративного процесса требует настраивающих свойств для ваших данных. Рассмотрите использование облаков точек субдискретизации pcdownsample перед использованием pcregistericp улучшить точность и КПД регистрации.
Нормали облака точек требуются регистрационным алгоритмом, когда вы выбираете 'pointToPlane' метрика. Поэтому, если облако точки ввода Normal свойство пусто, функция заполняет его. Когда функция заполняет Normal свойство, это использует 6 точек, чтобы соответствовать локальной плоскости. Шесть точек не могут работать при всех обстоятельствах. Если регистрация с 'pointToPlane' метрические сбои, рассмотрите вызов pcnormals функция, которая позволяет вам выбирать число точек, чтобы использовать.
[___] = pcregistericp( дополнительные опции использования заданы одним или несколькими moving,fixed,Name,Value)Name,Value парные аргументы.
Загрузите данные об облаке точек.
ptCloud = pcread('teapot.ply'); pcshow(ptCloud); title('Teapot');

Создайте объект преобразования с 30 вращениями степени вдоль z - ось и перевод [5,5,10].
A = [cos(pi/6) sin(pi/6) 0 0; ... -sin(pi/6) cos(pi/6) 0 0; ... 0 0 1 0; ... 5 5 10 1]; tform1 = affine3d(A);
Преобразуйте облако точек.
ptCloudTformed = pctransform(ptCloud,tform1);
pcshow(ptCloudTformed);
title('Transformed Teapot');
Примените твердую регистрацию.
tform = pcregistericp(ptCloudTformed,ptCloud,'Extrapolate',true);Сравните результат с истинным преобразованием.
disp(tform1.T);
0.8660 0.5000 0 0
-0.5000 0.8660 0 0
0 0 1.0000 0
5.0000 5.0000 10.0000 1.0000
tform2 = invert(tform); disp(tform2.T);
0.8660 0.5000 0.0000 0
-0.5000 0.8660 -0.0000 0
-0.0000 0.0000 1.0000 0
5.0000 5.0000 10.0000 1.0000
[1] Чен, Y. и Г. Медьони. “Объектное моделирование Регистрацией Нескольких Изображений Области значений”. Отобразите Вычисление Видения. Баттерворт-Хейнеманн. Издание 10, Выпуск 3, апрель 1992, стр 145-155.
[2] Besl, Пол Дж., Н. Д. Маккей. “Метод для Регистрации 3-D Форм”. Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Лос-Аламитос, CA: Общество эпохи компьютеризации IEEE. Издание 14, Выпуск 2, 1992, стр 239-256.
pcregistercorr | pcregisterndt | pcregistercpd | pctransform | pcshow | pcshowpair | pcdownsample | pcfitplane | pcdenoise | pcmerge